


Other Parts Discussed in Thread: CONTROLSUITE
I'm attempting to execute the ControlSUITE v3.2.6 example project "Example_28xEcan_A_to_B_Xmit" on a Delfino C28346 DIM168 Experimenter's Kit. The example configures the eCANA module to operate at 1Mbit/s, and sets the message ID and data fields of a continuously repeated packet as follows:
ECanaMboxes.MBOX25.MSGID.all = 0x95555555;
ECanaMboxes.MBOX25.MDL.all = 0x55555555;
ECanaMboxes.MBOX25.MDH.all = 0x55555555;
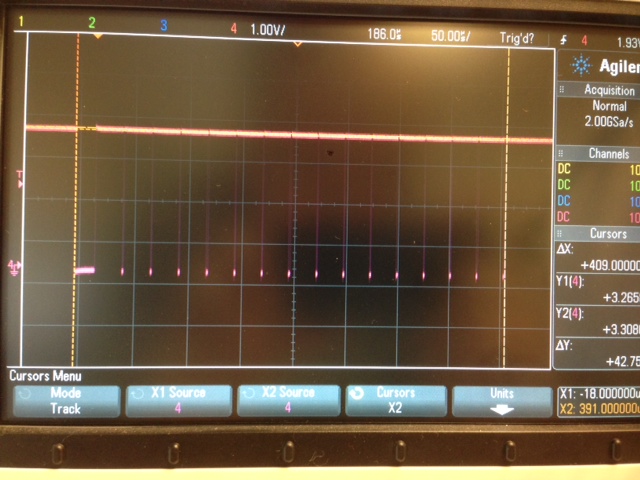
However, a scope trace of the CANA TX pin (below) shows that this code does not appear to produce the expected message. Changing the message ID and data fields has no effect on the output waveform.
Peripheral clocks are enabled and the eCANA module appears work through the configuration steps properly. Again, this is strictly the example code from ControlSUITE... I'm looking for any help or suggestions.
Thanks,
Jonathan

