hi chris:
I use the hall sensor on 28027f, but the angle output isn't good ,could you tell me more information about observer .c, I dont't know whitch Parameter maybe influence the output angle , I usual need a large load in motor start .
// setup the Observer module
OBSERVER_setup(observerHandle, USER_IQ_FULL_SCALE_FREQ_Hz, USER_MOTOR_RATED_FLUX, USER_IQ_FULL_SCALE_CURRENT_A, USER_MOTOR_NUM_POLE_PAIRS, USER_SYSTEM_INERTIA, USER_SYSTEM_FRICTION, gObserver_BW_Hz, USER_CTRL_PERIOD_sec, 100.0);
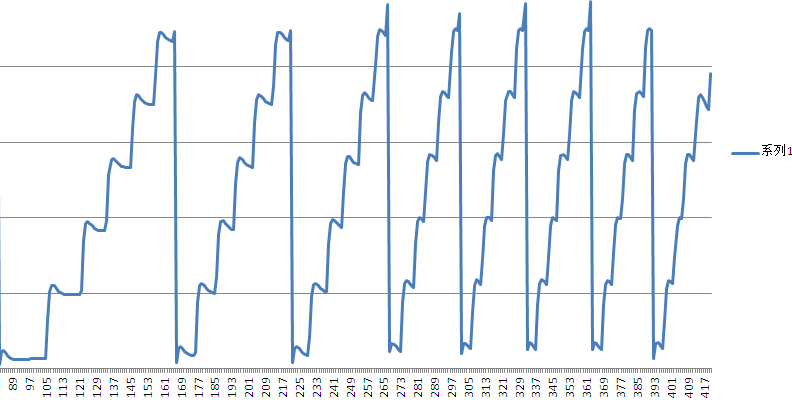
the angle: