


Other Parts Discussed in Thread: MOTORWARE
Hi all,
I have custom instaspin controllers on a PX4 quad using I2C... Everything works for a single byte set-point protocol but I want to use 2 bytes for better resolution. When I simply read two bytes successively I get the same byte read twice - I need something to wait in between the bytes but I cannot figure it out-OR something to tell the master to wait??? I found a few resources which basically say while !stop bit keep reading data in - but in the case below I will usually see 0x1 or 0xA for both the high and low byte- they toggle around and seem to get confused... -I'm using the wrappers Michael Jordan posted here: http://e2e.ti.com/support/microcontrollers/c2000/f/171/t/238353.aspx
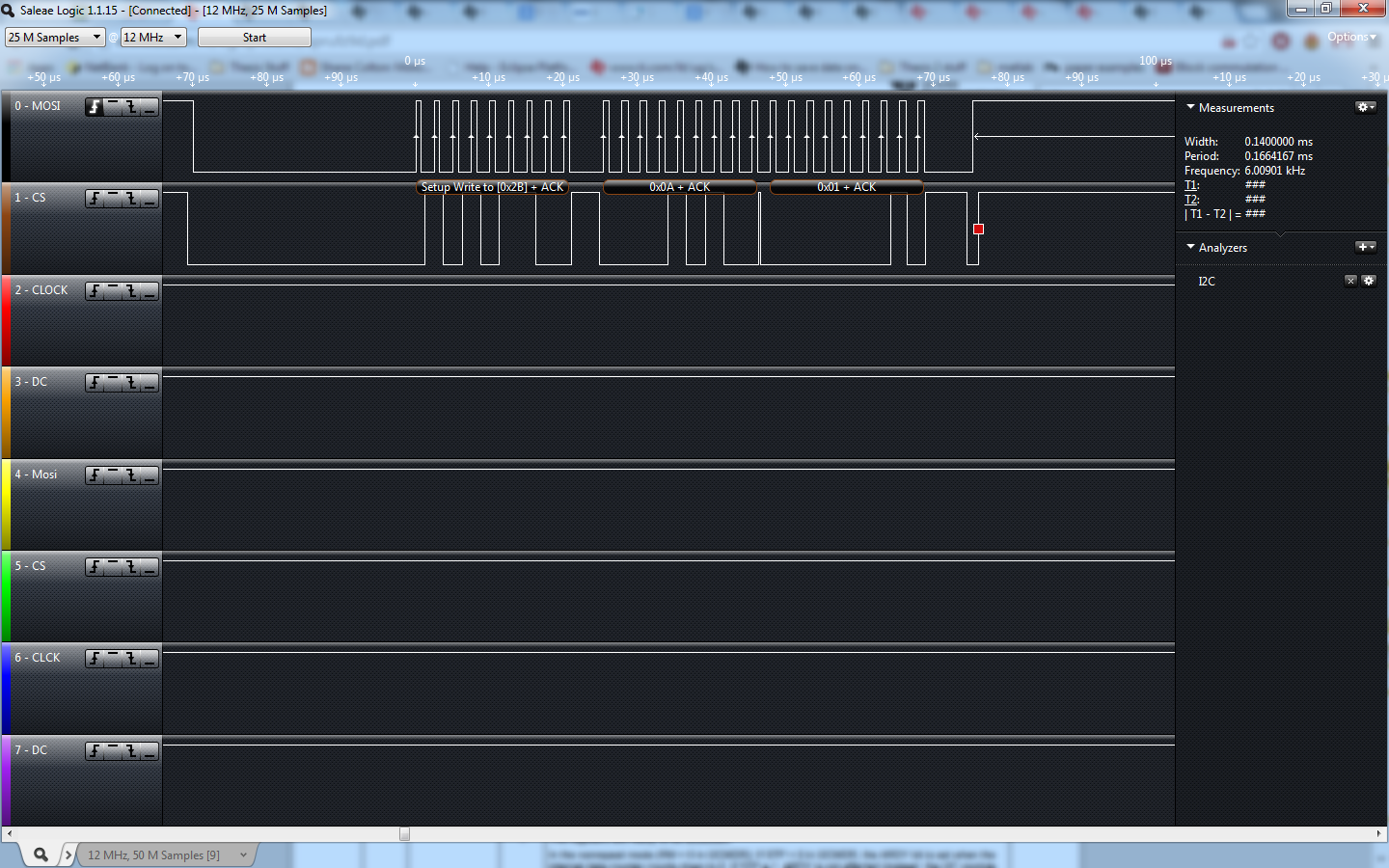
Basically, what are the steps that are required to read two bytes of data over I2C?
Thanks


