


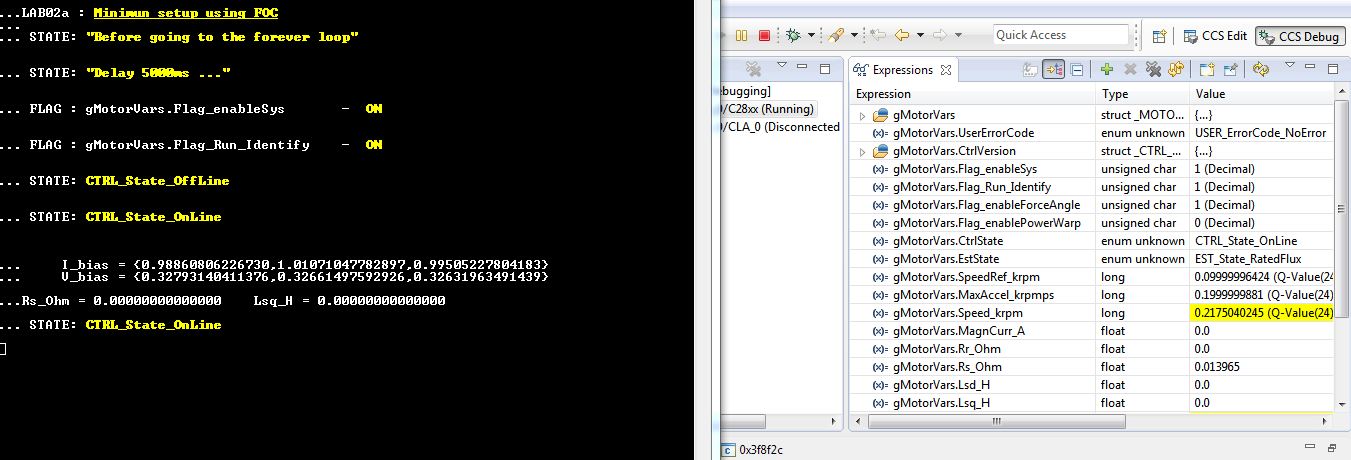
In this lab I can see that the Motor ID process spins the motor to find out the I_bias and then the V_bias.
With my setup, at this time the motor spins at 218rpm instead of 100 rpm as the SpeedRef_krpm said (see picture above).
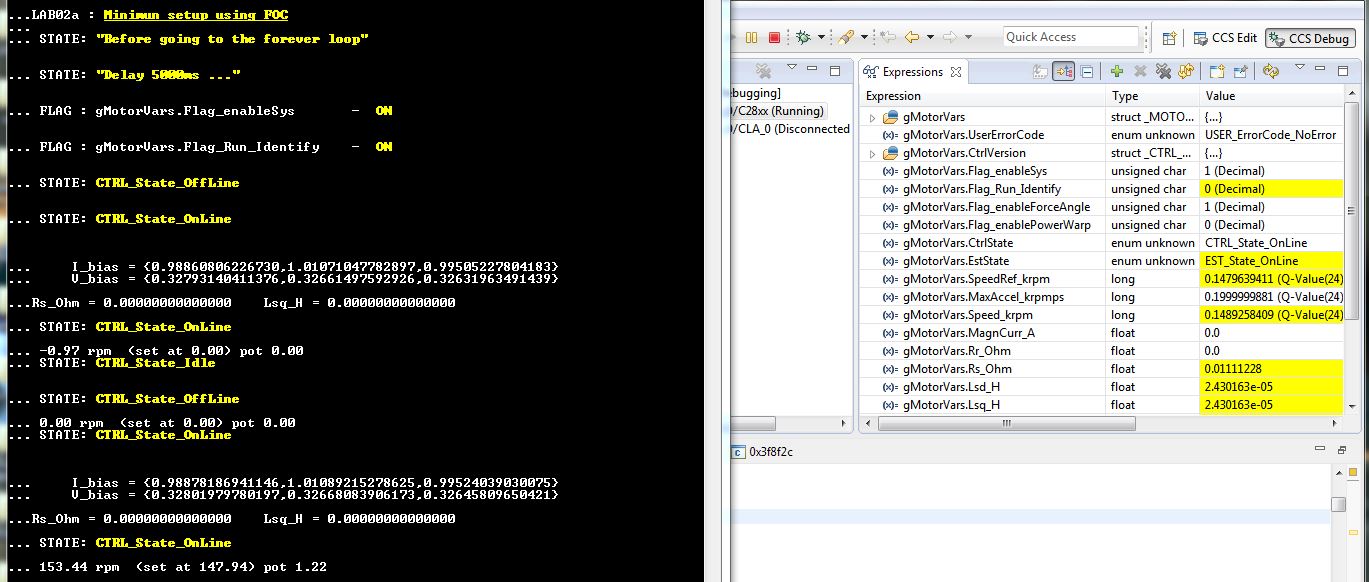
Later on, when it changes state; the Speed_krpm follows the SpeedRef_krpm in the following picture.
How does the motor ID process work?
The value returned by CTRL_getMaximumSpeed_pu(ctrlHandle) is .12.
What dictates the maximum speed pu ?
/* --COPYRIGHT--,BSD
* Copyright (c) 2012, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file solutions/instaspin_foc/src/proj_lab02a.c
//! \brief Using InstaSPIN�-FOC for the first time, Motor ID, full control system from ROM
//!
//! (C) Copyright 2011, Texas Instruments, Inc.
//! \defgroup PROJ_LAB02a PROJ_LAB02a
//@{
//! \defgroup PROJ_LAB02a_OVERVIEW Project Overview
//!
//! Using InstaSPIN�-FOC for the first time, Motor ID, full control system from ROM
//!
// **************************************************************************
// the includes
// system includes
#include <math.h>
#include "main.h"
#ifdef HAL_SCI
#include "sw/drivers/hal_sci/src/32b/f28x/f2806x/hal_sci.h"
#endif
#ifdef FLASH
#pragma CODE_SECTION(mainISR,"ramfuncs");
#endif
// Include header files used in the main function
// **************************************************************************
// the defines
#define LED_BLINK_FREQ_Hz 5
// **************************************************************************
// the globals
uint_least16_t gCounter_updateGlobals = 0;
bool Flag_Latch_softwareUpdate = true;
CTRL_Handle ctrlHandle;
HAL_Handle halHandle;
USER_Params gUserParams;
HAL_PwmData_t gPwmData = {_IQ(0.0), _IQ(0.0), _IQ(0.0)};
HAL_AdcData_t gAdcData;
_iq gMaxCurrentSlope = _IQ(0.0);
#ifdef FAST_ROM_V1p6
CTRL_Obj *controller_obj;
#else
CTRL_Obj ctrl; //v1p7 format
#endif
uint16_t gLEDcnt = 0;
volatile MOTOR_Vars_t gMotorVars = MOTOR_Vars_INIT;
#ifdef FLASH
// Used for running BackGround in flash, and ISR in RAM
extern uint16_t *RamfuncsLoadStart, *RamfuncsLoadEnd, *RamfuncsRunStart;
#endif
#ifdef USING_POTENTIOMETER
bool Flag_Init_Motor = true;
_iq gPotentiometer = _IQ(0.0);
#endif
#ifdef DRV8301_SPI
// Watch window interface to the 8301 SPI
DRV_SPI_8301_Vars_t gDrvSpi8301Vars;
#endif
// **************************************************************************
// the functions
void main(void)
{
uint_least8_t estNumber = 0;
#ifdef FAST_ROM_V1p6
uint_least8_t ctrlNumber = 0;
#endif
// Only used if running from FLASH
// Note that the variable FLASH is defined by the project
#ifdef FLASH
// Copy time critical code and Flash setup code to RAM
// The RamfuncsLoadStart, RamfuncsLoadEnd, and RamfuncsRunStart
// symbols are created by the linker. Refer to the linker files.
memCopy((uint16_t *)&RamfuncsLoadStart,(uint16_t *)&RamfuncsLoadEnd,(uint16_t *)&RamfuncsRunStart);
#endif
// initialize the hardware abstraction layer
halHandle = HAL_init(&hal,sizeof(hal));
// check for errors in user parameters
USER_checkForErrors(&gUserParams);
// store user parameter error in global variable
gMotorVars.UserErrorCode = USER_getErrorCode(&gUserParams);
// do not allow code execution if there is a user parameter error
if(gMotorVars.UserErrorCode != USER_ErrorCode_NoError)
{
for(;;)
{
gMotorVars.Flag_enableSys = false;
}
}
// initialize the user parameters
USER_setParams(&gUserParams);
// set the hardware abstraction layer parameters
HAL_setParams(halHandle,&gUserParams);
// initialize the controller
#ifdef FAST_ROM_V1p6
ctrlHandle = CTRL_initCtrl(ctrlNumber, estNumber); //v1p6 format (06xF and 06xM devices)
controller_obj = (CTRL_Obj *)ctrlHandle;
#else
ctrlHandle = CTRL_initCtrl(estNumber,&ctrl,sizeof(ctrl)); //v1p7 format default
#endif
{
CTRL_Version version;
// get the version number
CTRL_getVersion(ctrlHandle,&version);
gMotorVars.CtrlVersion = version;
}
// set the default controller parameters
CTRL_setParams(ctrlHandle,&gUserParams);
#ifdef HAL_SCI
HAL_sciA_init(halHandle);
#endif
// setup faults
HAL_setupFaults(halHandle);
// initialize the interrupt vector table
HAL_initIntVectorTable(halHandle);
// enable the ADC interrupts
HAL_enableAdcInts(halHandle);
// enable global interrupts
HAL_enableGlobalInts(halHandle);
// enable debug interrupts
HAL_enableDebugInt(halHandle);
// disable the PWM
HAL_disablePwm(halHandle);
#ifdef DRV8301_SPI
// turn on the DRV8301 if present
HAL_enableDrv(halHandle);
// initialize the DRV8301 interface
HAL_setupDrvSpi(halHandle,&gDrvSpi8301Vars);
#endif
// enable DC bus compensation
CTRL_setFlag_enableDcBusComp(ctrlHandle, true);
#ifdef HAL_SCI
HAL_printf(halHandle, "\n...LAB02a : " BOLD_S UNDER_S "Minimun setup using FOC" NORM_S);
HAL_printf(halHandle, "\n...");
HAL_print_state(halHandle, "Before going to the forever loop");
#endif
for(;;)
{
#ifdef HAL_SCI
unsigned int prt = 0;
#endif
#ifdef USING_POTENTIOMETER
if (Flag_Init_Motor) {
HAL_print_state(halHandle, "Delay 5000ms ...");
usDelay(5000L);
gMotorVars.Flag_enableSys = true;
#ifdef HAL_SCI
HAL_print_flag(halHandle, gMotorVars.Flag_enableSys);
#endif
}
#endif
// Waiting for enable system flag to be set
while(!(gMotorVars.Flag_enableSys));
// loop while the enable system flag is true
while(gMotorVars.Flag_enableSys)
{
#ifdef HAL_SCI
char str1[20], str2[20], str0[20];
#endif
CTRL_Obj *obj = (CTRL_Obj *)ctrlHandle;
// increment counters
gCounter_updateGlobals++;
if(CTRL_isError(ctrlHandle))
{
// set the enable controller flag to false
CTRL_setFlag_enableCtrl(ctrlHandle,false);
// set the enable system flag to false
gMotorVars.Flag_enableSys = false;
// disable the PWM
HAL_disablePwm(halHandle);
}
else
{
// update the controller state
bool flag_ctrlStateChanged = CTRL_updateState(ctrlHandle);
#ifdef USING_POTENTIOMETER
if (Flag_Init_Motor) {
usDelay(5000L);
gMotorVars.Flag_Run_Identify = true;
#ifdef HAL_SCI
HAL_print_flag(halHandle, gMotorVars.Flag_Run_Identify);
#endif
Flag_Init_Motor = false;
}
#endif
// enable or disable the control
CTRL_setFlag_enableCtrl(ctrlHandle, true/*gMotorVars.Flag_Run_Identify*/);
if(flag_ctrlStateChanged)
{
CTRL_State_e ctrlState = CTRL_getState(ctrlHandle);
EST_State_e estState = EST_getState(obj->estHandle);
if(ctrlState == CTRL_State_OffLine)
{
// enable the PWM
HAL_enablePwm(halHandle);
HAL_print_state(halHandle, CTRL_State_OffLine);
}
else if(ctrlState == CTRL_State_OnLine)
{
HAL_print_state(halHandle, CTRL_State_OnLine);
if((estState < EST_State_LockRotor) || (estState > EST_State_MotorIdentified))
{
// update the ADC bias values
HAL_updateAdcBias(halHandle);
}
// Return the bias value for currents
gMotorVars.I_bias.value[0] = HAL_getBias(halHandle,HAL_SensorType_Current,0);
gMotorVars.I_bias.value[1] = HAL_getBias(halHandle,HAL_SensorType_Current,1);
gMotorVars.I_bias.value[2] = HAL_getBias(halHandle,HAL_SensorType_Current,2);
// Return the bias value for voltages
gMotorVars.V_bias.value[0] = HAL_getBias(halHandle,HAL_SensorType_Voltage,0);
gMotorVars.V_bias.value[1] = HAL_getBias(halHandle,HAL_SensorType_Voltage,1);
gMotorVars.V_bias.value[2] = HAL_getBias(halHandle,HAL_SensorType_Voltage,2);
// enable the PWM
HAL_enablePwm(halHandle);
#ifdef HAL_SCI
_IQ24toa(str0,"%1.15f",gMotorVars.I_bias.value[0]);
_IQ24toa(str1,"%1.15f",gMotorVars.I_bias.value[1]);
_IQ24toa(str2,"%1.15f",gMotorVars.I_bias.value[2]);
HAL_printf(halHandle, "\n\n...\tI_bias = {%s,%s,%s}", str0, str1, str2);
_IQ24toa(str0,"%1.15f",gMotorVars.V_bias.value[0]);
_IQ24toa(str1,"%1.15f",gMotorVars.V_bias.value[1]);
_IQ24toa(str2,"%1.15f",gMotorVars.V_bias.value[2]);
HAL_printf(halHandle, "\n...\tV_bias = {%s,%s,%s}\n", str0, str1, str2);
_IQ24toa(str0,"%1.15f",gMotorVars.Rs_Ohm);
_IQ24toa(str1,"%1.15f",gMotorVars.Lsq_H);
HAL_printf(halHandle, "\n...\Rs_Ohm = %s Lsq_H = %s\n", str0, str1);
// HAL_printf(halHandle, "\n...\Rs_Ohm %1.15d * Lsq_H %1.15d\n", gMotorVars.Rs_Ohm, gMotorVars.Lsq_H);
HAL_print_state(halHandle, CTRL_State_OnLine);
#endif
}
else if(ctrlState == CTRL_State_Idle)
{
// disable the PWM
HAL_disablePwm(halHandle);
gMotorVars.Flag_Run_Identify = false;
HAL_print_state(halHandle, CTRL_State_Idle);
}
if((CTRL_getFlag_enableUserMotorParams(ctrlHandle) == true) &&
(ctrlState > CTRL_State_Idle) &&
(gMotorVars.CtrlVersion.minor == 6))
{
// call this function to fix 1p6
USER_softwareUpdate1p6(ctrlHandle);
}
}
}
if(EST_isMotorIdentified(obj->estHandle))
{
// set the current ramp
EST_setMaxCurrentSlope_pu(obj->estHandle,gMaxCurrentSlope);
gMotorVars.Flag_MotorIdentified = true;
#ifdef USING_POTENTIOMETER
// Using the potentiometer here to control the speed
gPotentiometer = HAL_readPotentiometerData(halHandle);
gMotorVars.SpeedRef_krpm = _IQmpy( gPotentiometer, CTRL_getMaximumSpeed_pu(ctrlHandle) );
#ifdef HAL_SCI
if (prt == 501) {
_IQ13toa(str1,"%10.03f",_IQ13mpy(_IQtoIQ13(gMotorVars.SpeedRef_krpm), _IQ13(1000.00)));
_IQ13toa(str2,"%10.03f",_IQ13mpy(_IQtoIQ13(gMotorVars.Speed_krpm), _IQ13(1000.00)));
_IQtoa(str0,"%10.03f",gPotentiometer);
HAL_printf(halHandle,"\r... %s rpm (set at %s) pot %s ", str2, str1, str0);
prt = 1;
} else {
prt++;
}
#endif
#endif
// set the speed reference
CTRL_setSpd_ref_krpm(ctrlHandle,gMotorVars.SpeedRef_krpm);
// set the speed acceleration
CTRL_setMaxAccel_pu(ctrlHandle,_IQmpy(MAX_ACCEL_KRPMPS_SF,gMotorVars.MaxAccel_krpmps));
if(Flag_Latch_softwareUpdate)
{
Flag_Latch_softwareUpdate = false;
USER_calcPIgains(ctrlHandle);
}
}
else
{
Flag_Latch_softwareUpdate = true;
// the estimator sets the maximum current slope during identification
gMaxCurrentSlope = EST_getMaxCurrentSlope_pu(obj->estHandle);
}
// when appropriate, update the global variables
if(gCounter_updateGlobals >= NUM_MAIN_TICKS_FOR_GLOBAL_VARIABLE_UPDATE)
{
// reset the counter
gCounter_updateGlobals = 0;
updateGlobalVariables_motor(ctrlHandle);
}
// recalculate Kp and Ki gains to fix the R/L limitation of 2000.0, and Kp limit to 0.11
recalcKpKi(ctrlHandle);
if(CTRL_getMotorType(ctrlHandle) == MOTOR_Type_Induction)
{
// set electrical frequency limit to zero while identifying an induction motor
setFeLimitZero(ctrlHandle);
// calculate Dir_qFmt for acim motors
acim_Dir_qFmtCalc(ctrlHandle);
}
// enable/disable the forced angle
EST_setFlag_enableForceAngle(obj->estHandle,gMotorVars.Flag_enableForceAngle);
// enable or disable power warp
CTRL_setFlag_enablePowerWarp(ctrlHandle,gMotorVars.Flag_enablePowerWarp);
#ifdef DRV8301_SPI
HAL_writeDrvData(halHandle,&gDrvSpi8301Vars);
HAL_readDrvData(halHandle,&gDrvSpi8301Vars);
#endif
} // end of while(gFlag_enableSys) loop
// disable the PWM
HAL_disablePwm(halHandle);
// set the default controller parameters (Reset the control to re-identify the motor)
CTRL_setParams(ctrlHandle,&gUserParams);
gMotorVars.Flag_Run_Identify = false;
} // end of for(;;) loop
} // end of main() function
interrupt void mainISR(void)
{
HAL_PwmData_t negPwmData = {_IQ(0.0), _IQ(0.0), _IQ(0.0)};
// toggle status LED
if(gLEDcnt++ > (uint_least32_t)(USER_ISR_FREQ_Hz / LED_BLINK_FREQ_Hz))
{
HAL_toggleLed(halHandle,(GPIO_Number_e)HAL_Gpio_LED2);
gLEDcnt = 0;
}
// acknowledge the ADC interrupt
HAL_acqAdcInt(halHandle,ADC_IntNumber_1);
// convert the ADC data
HAL_readAdcData(halHandle,&gAdcData);
// run the controller
CTRL_run(ctrlHandle,halHandle,&gAdcData,&negPwmData);
// negate PwmData generated by SVGEN module in ROM
gPwmData.Tabc.value[0] = _IQmpy(negPwmData.Tabc.value[0], _IQ(-1.0));
gPwmData.Tabc.value[1] = _IQmpy(negPwmData.Tabc.value[1], _IQ(-1.0));
gPwmData.Tabc.value[2] = _IQmpy(negPwmData.Tabc.value[2], _IQ(-1.0));
// write the PWM compare values
HAL_writePwmData(halHandle,&gPwmData);
// setup the controller
CTRL_setup(ctrlHandle);
return;
} // end of mainISR() function
void updateGlobalVariables_motor(CTRL_Handle handle)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
// get the speed estimate
gMotorVars.Speed_krpm = EST_getSpeed_krpm(obj->estHandle);
// get the real time speed reference coming out of the speed trajectory generator
gMotorVars.SpeedTraj_krpm = _IQmpy(CTRL_getSpd_int_ref_pu(handle),EST_get_pu_to_krpm_sf(obj->estHandle));
// get the magnetizing current
gMotorVars.MagnCurr_A = EST_getIdRated(obj->estHandle);
// get the rotor resistance
gMotorVars.Rr_Ohm = EST_getRr_Ohm(obj->estHandle);
// get the stator resistance
gMotorVars.Rs_Ohm = EST_getRs_Ohm(obj->estHandle);
// get the stator inductance in the direct coordinate direction
gMotorVars.Lsd_H = EST_getLs_d_H(obj->estHandle);
// get the stator inductance in the quadrature coordinate direction
gMotorVars.Lsq_H = EST_getLs_q_H(obj->estHandle);
// get the flux
gMotorVars.Flux_VpHz = EST_getFlux_VpHz(obj->estHandle);
// get the controller state
gMotorVars.CtrlState = CTRL_getState(handle);
// get the estimator state
gMotorVars.EstState = EST_getState(obj->estHandle);
// Get the DC buss voltage
gMotorVars.VdcBus_kV = _IQmpy(gAdcData.dcBus,_IQ(USER_IQ_FULL_SCALE_VOLTAGE_V/1000.0));
return;
} // end of updateGlobalVariables_motor() function
void recalcKpKi(CTRL_Handle handle)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
EST_State_e EstState = EST_getState(obj->estHandle);
if((EST_isMotorIdentified(obj->estHandle) == false) && (EstState == EST_State_Rs))
{
float_t Lhf = CTRL_getLhf(handle);
float_t Rhf = CTRL_getRhf(handle);
float_t RhfoverLhf = Rhf/Lhf;
_iq Kp = _IQ(0.25*Lhf*USER_IQ_FULL_SCALE_CURRENT_A/(USER_CTRL_PERIOD_sec*USER_IQ_FULL_SCALE_VOLTAGE_V));
_iq Ki = _IQ(RhfoverLhf*USER_CTRL_PERIOD_sec);
// set Rhf/Lhf
CTRL_setRoverL(handle,RhfoverLhf);
// set the controller proportional gains
CTRL_setKp(handle,CTRL_Type_PID_Id,Kp);
CTRL_setKp(handle,CTRL_Type_PID_Iq,Kp);
// set the Id controller gains
CTRL_setKi(handle,CTRL_Type_PID_Id,Ki);
PID_setKi(obj->pidHandle_Id,Ki);
// set the Iq controller gains
CTRL_setKi(handle,CTRL_Type_PID_Iq,Ki);
PID_setKi(obj->pidHandle_Iq,Ki);
}
return;
} // end of recalcKpKi() function
void setFeLimitZero(CTRL_Handle handle)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
EST_State_e EstState = EST_getState(obj->estHandle);
_iq fe_neg_max_pu;
_iq fe_pos_min_pu;
if((EST_isMotorIdentified(obj->estHandle) == false) && (CTRL_getMotorType(handle) == MOTOR_Type_Induction))
{
fe_neg_max_pu = _IQ30(0.0);
fe_pos_min_pu = _IQ30(0.0);
}
else
{
fe_neg_max_pu = _IQ30(-USER_ZEROSPEEDLIMIT);
fe_pos_min_pu = _IQ30(USER_ZEROSPEEDLIMIT);
}
EST_setFe_neg_max_pu(obj->estHandle, fe_neg_max_pu);
EST_setFe_pos_min_pu(obj->estHandle, fe_pos_min_pu);
return;
} // end of setFeLimitZero() function
void acim_Dir_qFmtCalc(CTRL_Handle handle)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
EST_State_e EstState = EST_getState(obj->estHandle);
if(EstState == EST_State_IdRated)
{
EST_setDir_qFmt(obj->estHandle, EST_computeDirection_qFmt(obj->estHandle, 0.7));
}
return;
} // end of acim_Dir_qFmtCalc() function
//@} //defgroup
// end of file

