Other Parts Discussed in Thread: CONTROLSUITE
Hi
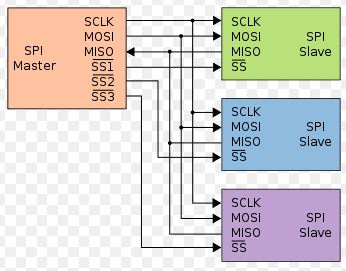
Kindly help me with SPI communication between two DSP F28069 control sticks on urgent basis.
I initially started with CAN but it is not possible with the control sticks and i have only three days left to establish communication between two control sticks.
I wish to send data through SPI of one DSP to SPI of another DSP n if possible display it on the terminal.
Thanking you in advance
Sneha