


Hi every one
here is my can bus interrupt receive code,
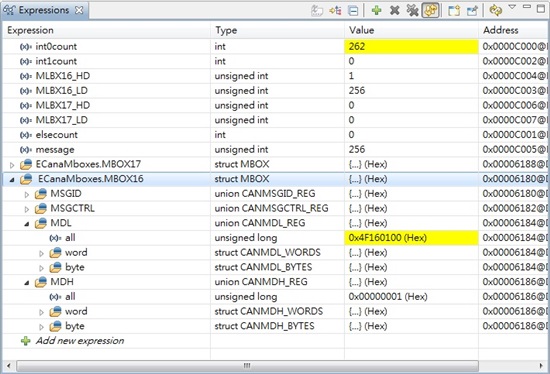
now i've sucessed renew the mail box data, bus when i import to the other variable
the variable can not renew the data
 #include "DSP28x_Project.h" // DSP281x Headerfile Include File
//#include "DSP2833x_Examples.h" // DSP281x Examples Include File
int int0count = 0; // Counter to track the # of level 0 interrupts
int int1count = 0; // Counter to track the # of level 1 interrupts
volatile unsigned int MLBX16_HD = 0;
volatile unsigned int MLBX16_LD = 0;
unsigned int MLBX17_HD = 0;
unsigned int MLBX17_LD = 0;
unsigned int message = 0;
int elsecount = 0;
interrupt void eCAN0INT_ISR(void);
//interrupt void eCAN1INT_ISR(void);
void ECan_MALBOX_INIT(void);
struct ECAN_REGS ECanaShadow;
void main()
{
InitSysCtrl();
InitECanGpio();
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
// Initialize the CAN module //
InitECan();
//InitPieVectTable();
ECan_MALBOX_INIT();
EALLOW;
// Configure CAN interrupts //
ECanaShadow.CANMIM.all = 0xFFFFFFFF;
//ECanaRegs.CANMIM.all = ECanaShadow.CANMIM.all;
ECanaShadow.CANMIL.all = 0x00000000; // MBOX0 asserts MTOF0 (eCAN0INT)
//ECanaShadow.CANMIL.bit.MIL0 = 1 ; // MBOX0 asserts MTOF1 (eCAN1INT)
ECanaRegs.CANMIL.all = ECanaShadow.CANMIL.all;
ECanaShadow.CANMIM.all = 0xFFFFFFFF; // Enable interrupts for all mailboxes
ECanaRegs.CANMIM.all = ECanaShadow.CANMIM.all;
//ECanaShadow.CANGIF0.all = ECanaRegs.CANGIF0.all;
//ECanaShadow.CANGIF0.all = 0xFFFFFFFF;
//ECanaRegs.CANGIF0.all = ECanaShadow.CANGIF0.all;
//ECanaShadow.CANGIM.all = ECanaRegs.CANGIM.all;
ECanaShadow.CANGIM.all = 0;
ECanaShadow.CANGIM.bit.I0EN = 1; // Enable eCAN0INT
//ECanaShadow.CANGIM.bit.I1EN = 1; // Enable eCAN1INT
//ECanaShadow.CANGIM.bit.MTOM = 1; // Enable MBX Timeout interrupt
ECanaRegs.CANGIM.all = ECanaShadow.CANGIM.all;
PieVectTable.ECAN0INTA = &eCAN0INT_ISR;
//PieVectTable.ECAN1INTA = &eCAN1INT_ISR;
EDIS;
PieCtrlRegs.PIECTRL.bit.ENPIE = 1; // Enable vector fetching from PIE block
PieCtrlRegs.PIEACK.bit.ACK9 = 1; // Enables PIE to drive a pulse into the CPU
PieCtrlRegs.PIEIER9.bit.INTx5 = 1; // Enable INTx.5 of INT9 (eCAN0INT)
//PieCtrlRegs.PIEIER9.bit.INTx6 = 1; // Enable INTx.6 of INT9 (eCAN1INT)
IER |= M_INT9; // Enable INT9 of CPU
EINT; // Global enable of interrupts
//ERTM;
// Write to the mailbox RAM field //
//ECanaMboxes.MBOX0.MDL.all = 0x01234567;
//ECanaMboxes.MBOX0.MDH.all = 0x89ABCDEF;
// Begin transmitting //
//while(1) // Uncomment this line for infinite transmissions
/*for(i=0; i < TXCOUNT; i++) // Uncomment this line for finite transmissions
{
ECanaShadow.CANTRS.all = 0;
ECanaShadow.CANTRS.bit.TRS0 = 1; // Set TRS for mailbox under test
ECanaRegs.CANTRS.all = ECanaShadow.CANTRS.all;
while(ECanaRegs.CANTA.bit.TA0 == 0 ) {} // Wait for TA0 bit to be set..
ECanaShadow.CANTA.all = 0;
ECanaShadow.CANTA.bit.TA0 = 1; // Clear TA0
ECanaRegs.CANTA.all = ECanaShadow.CANTA.all;
while(ECanaRegs.CANRMP.all != 0xFFFFFFFF ) {} // Wait for all RMPn to be set..
ECanaRegs.CANRMP.all = 0xFFFFFFFF; // Clear all RMPn bits and start
}*/
for(;;)
{
message = MLBX16_HD<<8;
message |= MLBX16_LD;
}
}ho
void ECan_MALBOX_INIT()
{
//struct ECAN_REGS ECanaShadow;
// Config Transmit mail box ID //
ECanaMboxes.MBOX0.MSGID.all = 0x80000501; // Extended Identifier
ECanaMboxes.MBOX1.MSGID.all = 0x80000502; //
ECanaMboxes.MBOX2.MSGID.all = 0x80000503; //
ECanaMboxes.MBOX3.MSGID.all = 0x80000504; //
ECanaMboxes.MBOX4.MSGID.all = 0x80000505; //
ECanaMboxes.MBOX5.MSGID.all = 0x80000506; //
ECanaMboxes.MBOX6.MSGID.all = 0x80000507; //
ECanaMboxes.MBOX7.MSGID.all = 0x80000508; //
ECanaMboxes.MBOX8.MSGID.all = 0x80000509; //
ECanaMboxes.MBOX9.MSGID.all = 0x80000510; //
ECanaMboxes.MBOX10.MSGID.all = 0x80000511; //
ECanaMboxes.MBOX11.MSGID.all = 0x80000512; //
ECanaMboxes.MBOX12.MSGID.all = 0x80000513; //
ECanaMboxes.MBOX13.MSGID.all = 0x80000514; //
ECanaMboxes.MBOX14.MSGID.all = 0x80000515; //
ECanaMboxes.MBOX15.MSGID.all = 0x80000516; //
// Config Receive mail box ID //
ECanaMboxes.MBOX16.MSGID.all = 0x80000601; //
ECanaMboxes.MBOX17.MSGID.all = 0x80000602; //
ECanaMboxes.MBOX18.MSGID.all = 0x80000603; //
ECanaMboxes.MBOX19.MSGID.all = 0x80000604; //
ECanaMboxes.MBOX20.MSGID.all = 0x80000605; //
ECanaMboxes.MBOX21.MSGID.all = 0x80000606; //
ECanaMboxes.MBOX22.MSGID.all = 0x80000607; //
ECanaMboxes.MBOX23.MSGID.all = 0x80000608; //
ECanaMboxes.MBOX24.MSGID.all = 0x80000609; //
ECanaMboxes.MBOX25.MSGID.all = 0x80000610; //
ECanaMboxes.MBOX26.MSGID.all = 0x80000611; //
ECanaMboxes.MBOX27.MSGID.all = 0x80000611; //
ECanaMboxes.MBOX28.MSGID.all = 0x80000613; //
ECanaMboxes.MBOX29.MSGID.all = 0x80000614; //
ECanaMboxes.MBOX30.MSGID.all = 0x80000615; //
ECanaMboxes.MBOX31.MSGID.all = 0x80000616; //
// Write to DLC field in Master Control reg //
ECanaMboxes.MBOX0.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX1.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX2.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX3.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX4.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX5.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX6.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX7.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX8.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX9.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX10.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX11.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX12.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX13.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX14.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX15.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX16.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX17.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX18.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX19.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX20.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX21.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX22.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX23.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX24.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX25.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX26.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX27.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX28.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX29.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX30.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX31.MSGCTRL.bit.DLC = 8;
// Configure Mailbox under test as a Transmit & Receive mailbox //
ECanaShadow.CANMD.all = ECanaRegs.CANMD.all;
ECanaShadow.CANMD.all = 0xFFFF0000;
ECanaRegs.CANMD.all = ECanaShadow.CANMD.all;
// Enable Mailbox under test //
ECanaShadow.CANME.all = ECanaRegs.CANME.all;
ECanaShadow.CANME.all = 0xFFFFFFFF;
ECanaRegs.CANME.all = ECanaShadow.CANME.all;
}
interrupt void eCAN0INT_ISR(void) // eCAN
{
if(ECanaRegs.CANRMP.bit.RMP16 == 1)
{
int0count++;
ECanaRegs.CANRMP.bit.RMP16 = 1;
MLBX16_HD = ECanaMboxes.MBOX16.MDH.all;
MLBX16_LD = ECanaMboxes.MBOX16.MDL.all;
PieCtrlRegs.PIEACK.bit.ACK9 = 1;
EINT;
}
else if(ECanaRegs.CANRMP.bit.RMP17 == 1)
{
int1count++;
ECanaRegs.CANRMP.bit.RMP17 = 1;
MLBX17_HD = ECanaMboxes.MBOX17.MDH.all;
MLBX17_LD = ECanaMboxes.MBOX17.MDL.all;
PieCtrlRegs.PIEACK.bit.ACK9 = 1;
EINT;
}
else
elsecount++;
}
/*CANalyzer configuration file: 1M80SPRX.cfg... */
#include "DSP28x_Project.h" // DSP281x Headerfile Include File
//#include "DSP2833x_Examples.h" // DSP281x Examples Include File
int int0count = 0; // Counter to track the # of level 0 interrupts
int int1count = 0; // Counter to track the # of level 1 interrupts
volatile unsigned int MLBX16_HD = 0;
volatile unsigned int MLBX16_LD = 0;
unsigned int MLBX17_HD = 0;
unsigned int MLBX17_LD = 0;
unsigned int message = 0;
int elsecount = 0;
interrupt void eCAN0INT_ISR(void);
//interrupt void eCAN1INT_ISR(void);
void ECan_MALBOX_INIT(void);
struct ECAN_REGS ECanaShadow;
void main()
{
InitSysCtrl();
InitECanGpio();
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
// Initialize the CAN module //
InitECan();
//InitPieVectTable();
ECan_MALBOX_INIT();
EALLOW;
// Configure CAN interrupts //
ECanaShadow.CANMIM.all = 0xFFFFFFFF;
//ECanaRegs.CANMIM.all = ECanaShadow.CANMIM.all;
ECanaShadow.CANMIL.all = 0x00000000; // MBOX0 asserts MTOF0 (eCAN0INT)
//ECanaShadow.CANMIL.bit.MIL0 = 1 ; // MBOX0 asserts MTOF1 (eCAN1INT)
ECanaRegs.CANMIL.all = ECanaShadow.CANMIL.all;
ECanaShadow.CANMIM.all = 0xFFFFFFFF; // Enable interrupts for all mailboxes
ECanaRegs.CANMIM.all = ECanaShadow.CANMIM.all;
//ECanaShadow.CANGIF0.all = ECanaRegs.CANGIF0.all;
//ECanaShadow.CANGIF0.all = 0xFFFFFFFF;
//ECanaRegs.CANGIF0.all = ECanaShadow.CANGIF0.all;
//ECanaShadow.CANGIM.all = ECanaRegs.CANGIM.all;
ECanaShadow.CANGIM.all = 0;
ECanaShadow.CANGIM.bit.I0EN = 1; // Enable eCAN0INT
//ECanaShadow.CANGIM.bit.I1EN = 1; // Enable eCAN1INT
//ECanaShadow.CANGIM.bit.MTOM = 1; // Enable MBX Timeout interrupt
ECanaRegs.CANGIM.all = ECanaShadow.CANGIM.all;
PieVectTable.ECAN0INTA = &eCAN0INT_ISR;
//PieVectTable.ECAN1INTA = &eCAN1INT_ISR;
EDIS;
PieCtrlRegs.PIECTRL.bit.ENPIE = 1; // Enable vector fetching from PIE block
PieCtrlRegs.PIEACK.bit.ACK9 = 1; // Enables PIE to drive a pulse into the CPU
PieCtrlRegs.PIEIER9.bit.INTx5 = 1; // Enable INTx.5 of INT9 (eCAN0INT)
//PieCtrlRegs.PIEIER9.bit.INTx6 = 1; // Enable INTx.6 of INT9 (eCAN1INT)
IER |= M_INT9; // Enable INT9 of CPU
EINT; // Global enable of interrupts
//ERTM;
// Write to the mailbox RAM field //
//ECanaMboxes.MBOX0.MDL.all = 0x01234567;
//ECanaMboxes.MBOX0.MDH.all = 0x89ABCDEF;
// Begin transmitting //
//while(1) // Uncomment this line for infinite transmissions
/*for(i=0; i < TXCOUNT; i++) // Uncomment this line for finite transmissions
{
ECanaShadow.CANTRS.all = 0;
ECanaShadow.CANTRS.bit.TRS0 = 1; // Set TRS for mailbox under test
ECanaRegs.CANTRS.all = ECanaShadow.CANTRS.all;
while(ECanaRegs.CANTA.bit.TA0 == 0 ) {} // Wait for TA0 bit to be set..
ECanaShadow.CANTA.all = 0;
ECanaShadow.CANTA.bit.TA0 = 1; // Clear TA0
ECanaRegs.CANTA.all = ECanaShadow.CANTA.all;
while(ECanaRegs.CANRMP.all != 0xFFFFFFFF ) {} // Wait for all RMPn to be set..
ECanaRegs.CANRMP.all = 0xFFFFFFFF; // Clear all RMPn bits and start
}*/
for(;;)
{
message = MLBX16_HD<<8;
message |= MLBX16_LD;
}
}ho
void ECan_MALBOX_INIT()
{
//struct ECAN_REGS ECanaShadow;
// Config Transmit mail box ID //
ECanaMboxes.MBOX0.MSGID.all = 0x80000501; // Extended Identifier
ECanaMboxes.MBOX1.MSGID.all = 0x80000502; //
ECanaMboxes.MBOX2.MSGID.all = 0x80000503; //
ECanaMboxes.MBOX3.MSGID.all = 0x80000504; //
ECanaMboxes.MBOX4.MSGID.all = 0x80000505; //
ECanaMboxes.MBOX5.MSGID.all = 0x80000506; //
ECanaMboxes.MBOX6.MSGID.all = 0x80000507; //
ECanaMboxes.MBOX7.MSGID.all = 0x80000508; //
ECanaMboxes.MBOX8.MSGID.all = 0x80000509; //
ECanaMboxes.MBOX9.MSGID.all = 0x80000510; //
ECanaMboxes.MBOX10.MSGID.all = 0x80000511; //
ECanaMboxes.MBOX11.MSGID.all = 0x80000512; //
ECanaMboxes.MBOX12.MSGID.all = 0x80000513; //
ECanaMboxes.MBOX13.MSGID.all = 0x80000514; //
ECanaMboxes.MBOX14.MSGID.all = 0x80000515; //
ECanaMboxes.MBOX15.MSGID.all = 0x80000516; //
// Config Receive mail box ID //
ECanaMboxes.MBOX16.MSGID.all = 0x80000601; //
ECanaMboxes.MBOX17.MSGID.all = 0x80000602; //
ECanaMboxes.MBOX18.MSGID.all = 0x80000603; //
ECanaMboxes.MBOX19.MSGID.all = 0x80000604; //
ECanaMboxes.MBOX20.MSGID.all = 0x80000605; //
ECanaMboxes.MBOX21.MSGID.all = 0x80000606; //
ECanaMboxes.MBOX22.MSGID.all = 0x80000607; //
ECanaMboxes.MBOX23.MSGID.all = 0x80000608; //
ECanaMboxes.MBOX24.MSGID.all = 0x80000609; //
ECanaMboxes.MBOX25.MSGID.all = 0x80000610; //
ECanaMboxes.MBOX26.MSGID.all = 0x80000611; //
ECanaMboxes.MBOX27.MSGID.all = 0x80000611; //
ECanaMboxes.MBOX28.MSGID.all = 0x80000613; //
ECanaMboxes.MBOX29.MSGID.all = 0x80000614; //
ECanaMboxes.MBOX30.MSGID.all = 0x80000615; //
ECanaMboxes.MBOX31.MSGID.all = 0x80000616; //
// Write to DLC field in Master Control reg //
ECanaMboxes.MBOX0.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX1.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX2.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX3.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX4.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX5.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX6.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX7.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX8.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX9.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX10.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX11.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX12.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX13.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX14.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX15.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX16.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX17.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX18.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX19.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX20.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX21.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX22.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX23.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX24.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX25.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX26.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX27.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX28.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX29.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX30.MSGCTRL.bit.DLC = 8;
ECanaMboxes.MBOX31.MSGCTRL.bit.DLC = 8;
// Configure Mailbox under test as a Transmit & Receive mailbox //
ECanaShadow.CANMD.all = ECanaRegs.CANMD.all;
ECanaShadow.CANMD.all = 0xFFFF0000;
ECanaRegs.CANMD.all = ECanaShadow.CANMD.all;
// Enable Mailbox under test //
ECanaShadow.CANME.all = ECanaRegs.CANME.all;
ECanaShadow.CANME.all = 0xFFFFFFFF;
ECanaRegs.CANME.all = ECanaShadow.CANME.all;
}
interrupt void eCAN0INT_ISR(void) // eCAN
{
if(ECanaRegs.CANRMP.bit.RMP16 == 1)
{
int0count++;
ECanaRegs.CANRMP.bit.RMP16 = 1;
MLBX16_HD = ECanaMboxes.MBOX16.MDH.all;
MLBX16_LD = ECanaMboxes.MBOX16.MDL.all;
PieCtrlRegs.PIEACK.bit.ACK9 = 1;
EINT;
}
else if(ECanaRegs.CANRMP.bit.RMP17 == 1)
{
int1count++;
ECanaRegs.CANRMP.bit.RMP17 = 1;
MLBX17_HD = ECanaMboxes.MBOX17.MDH.all;
MLBX17_LD = ECanaMboxes.MBOX17.MDL.all;
PieCtrlRegs.PIEACK.bit.ACK9 = 1;
EINT;
}
else
elsecount++;
}
/*CANalyzer configuration file: 1M80SPRX.cfg... */

