Other Parts Discussed in Thread: MOTORWARE
Hi,
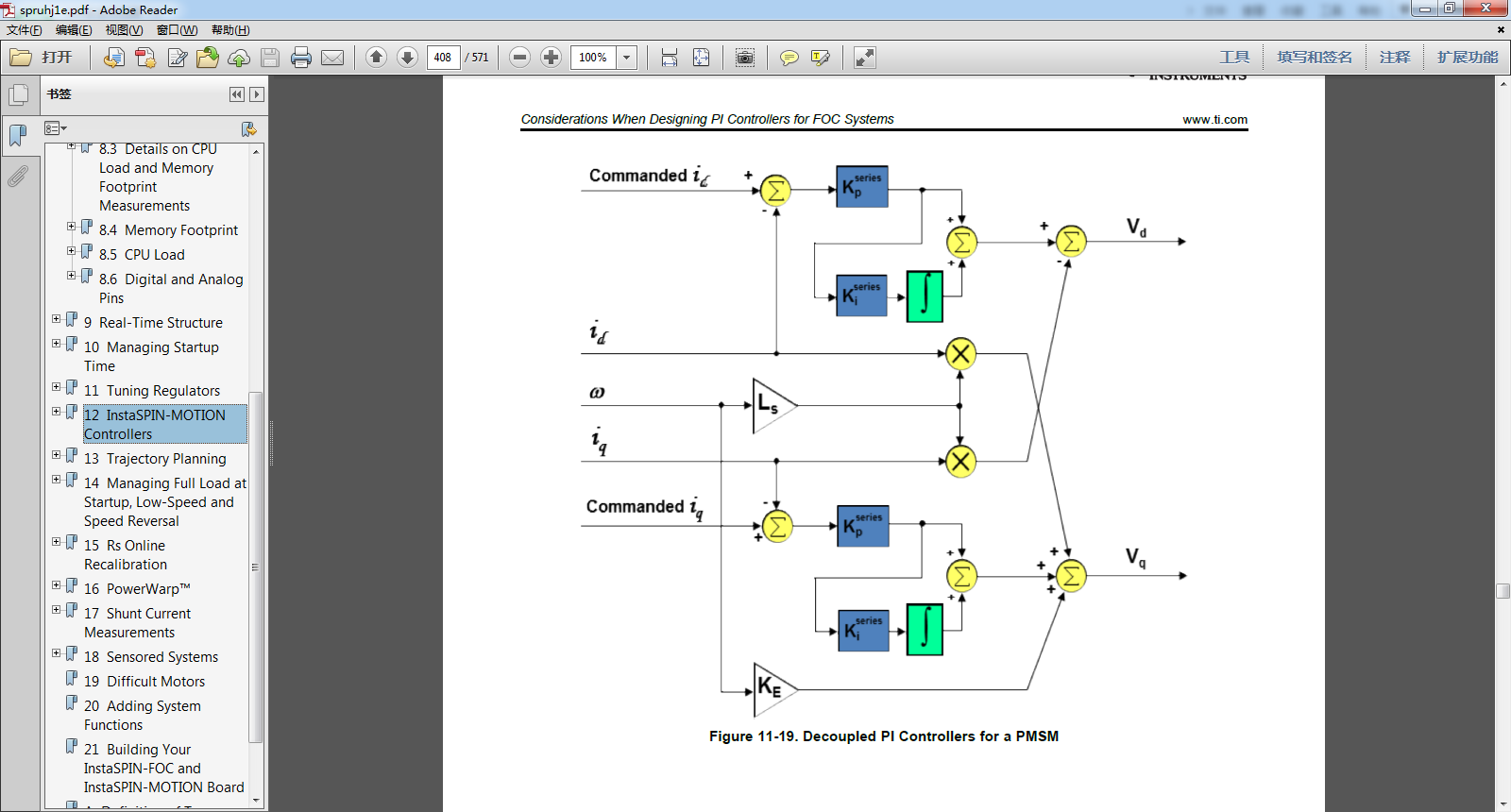
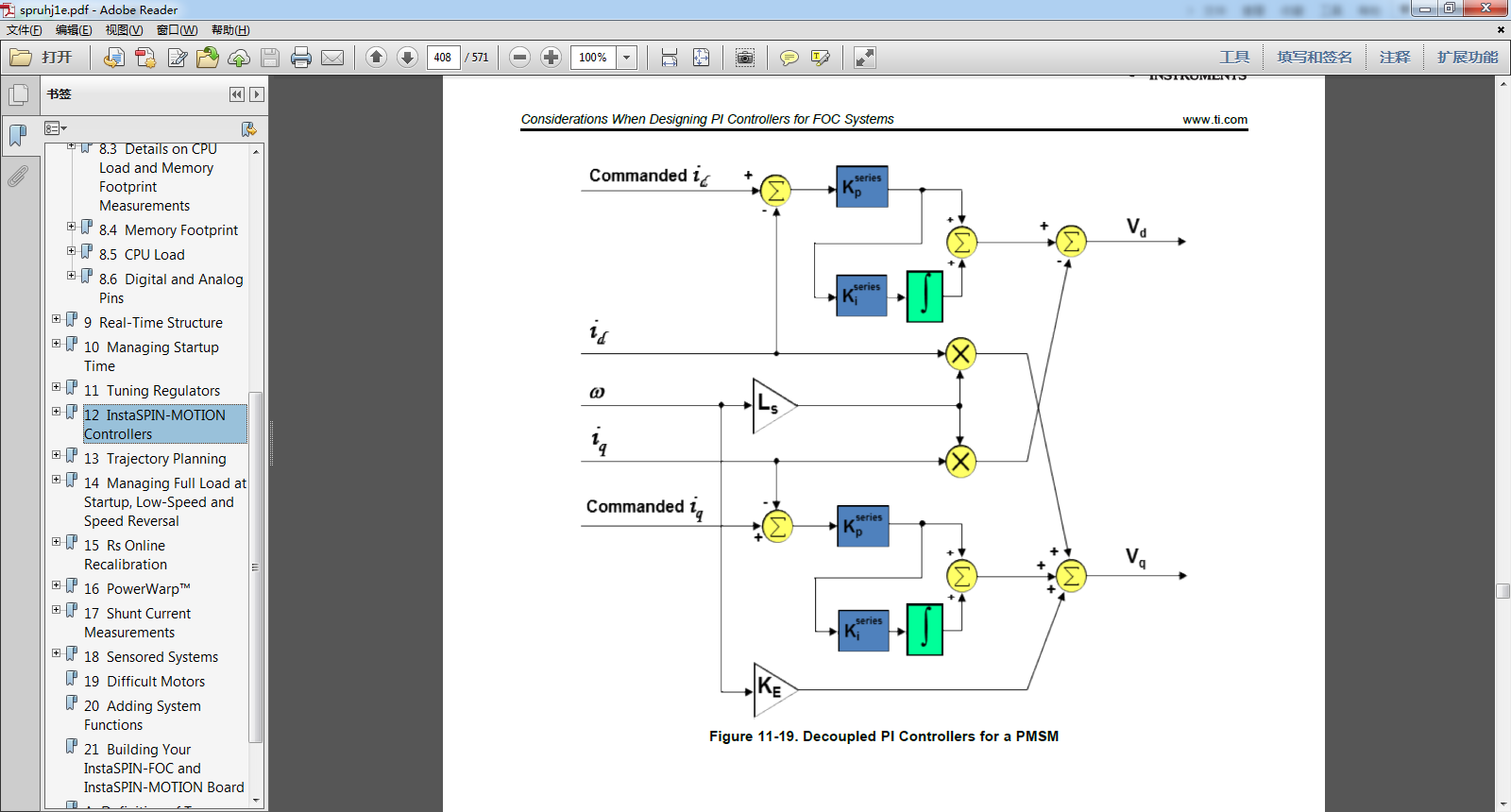
From manual, we undetstand we should use Decoupled PI Controllers for a PMSM. However, I check lab demo, e.g., in lab 4, we only find PI controllers and decoupling (as below picture) is missing.
Is my observation is right ? Or I have wrong understanding.
Thanks in advance
for.