Other Parts Discussed in Thread: DRV8301
I have bought LVSERVOMTR (Teknic M-2310P-LN-04K) and DRV8301-69M-KIT . Control characteristics are alright by evaluating.
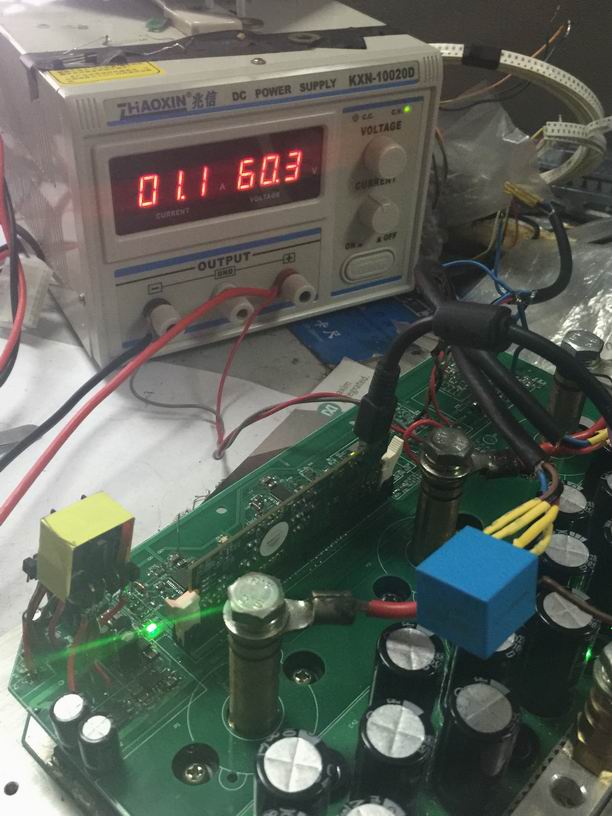
Then I designed my circuit board by reference to DRV8301-69M-KIT .
I need more output current to diver MOSFET,so I use IR2114.I used hall current sensor which range is 40A to do three-phase current measurement.
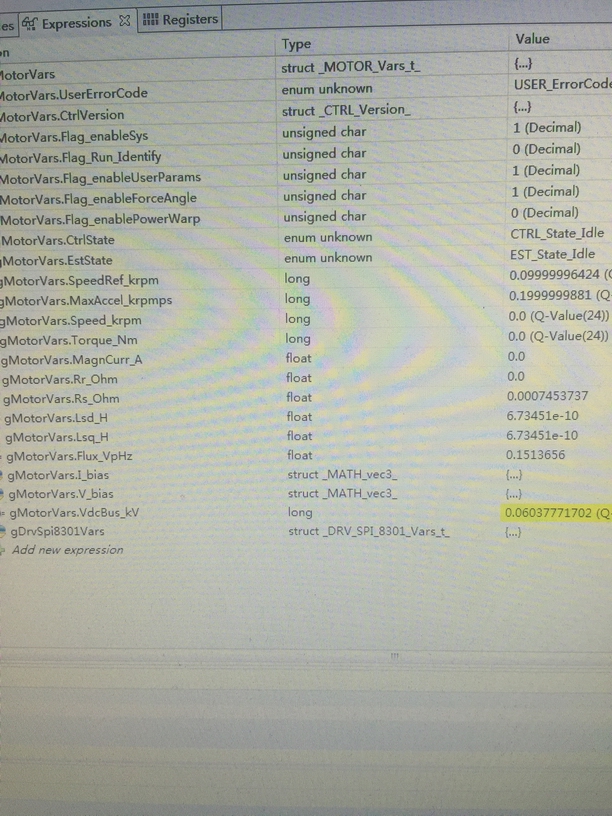
When I used my board to run lab02b,I got Rs = 2.xxx but Ls_q and Ls_d = 6.xxx *e-10. I think it was wrong result.
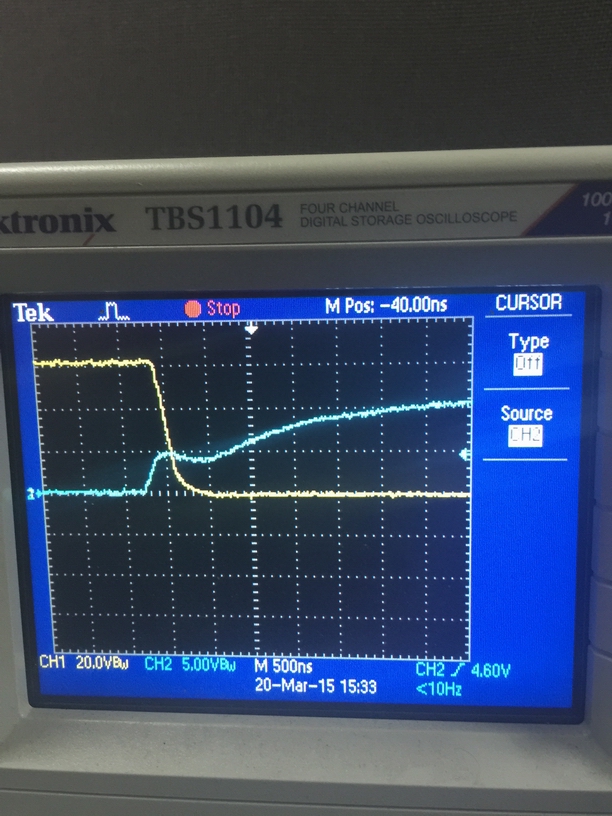
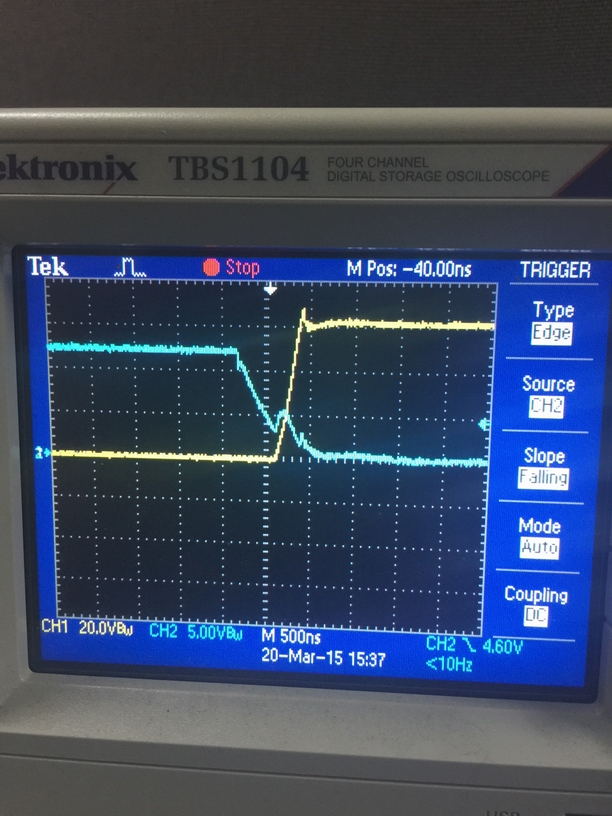
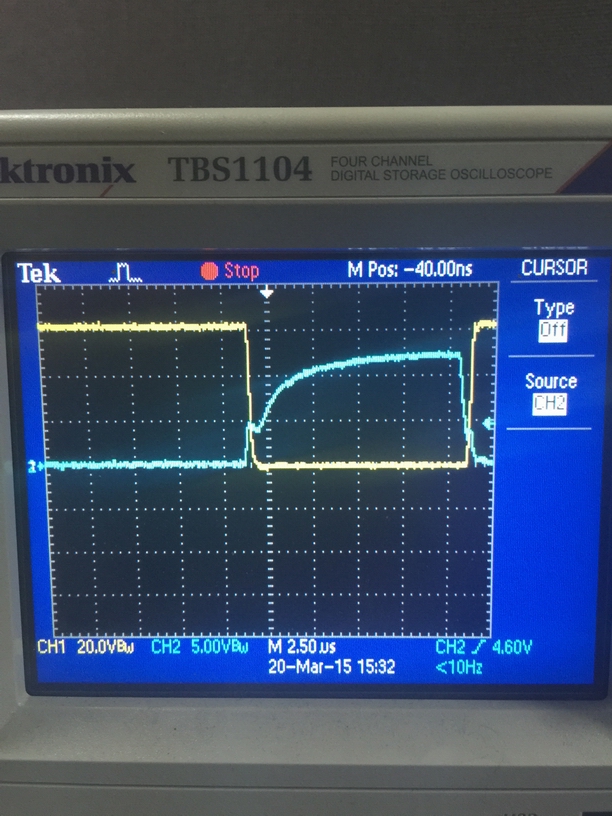
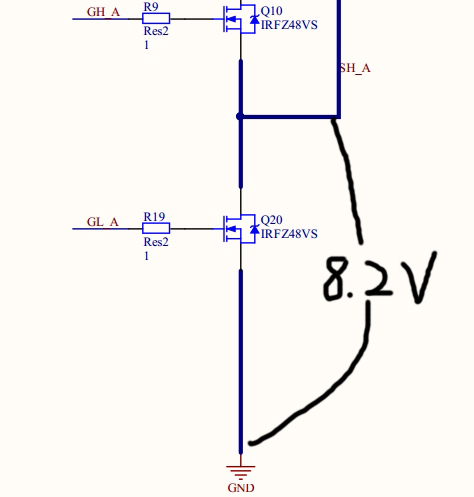
Now I confirm polarity of the current feedback is correct.I found each of the phases voltage to ground was 8.1V when the code did not perform but ti was 0.8V on DRV8301-69M-KIT . can it lead to the wrong parameter identification results? Or there are other mistakes?
USE.H:2061.user.h
Schematic:https://e2e.ti.com/cfs-file/__key/communityserver-discussions-components-files/171/Schematic.7z