Other Parts Discussed in Thread: MOTORWARE, TMDSHVMTRINSPIN, TMS320F28069M, CONTROLSUITE
Hello,
I'm having some trouble running motorware lab 5e. I have a high voltage kit (TMDSHVMTRINSPIN) with a TMS320F28069M control card and I need to control the speed of a treadmill without and encoder.
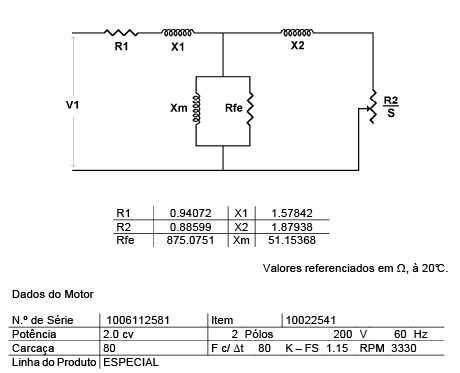
I've already updated my motor parameters according to the data provided by my supplier as you can see in the image attached and I calculated these values based on section 4.8 from user's guide.
So I bypassed labs 2, 4, 5a and 5b and did the inertia identification process from lab 5c. So far so good.
Then I moved on to lab 5e and adjusted the bandwidth gain and went to test the sensorless control, but I'm not having the expected result.
It is relatively easy to stop the rotation of the motor by putting more weight pressing with my foot while I'm on the treadmill. I saw a video showing the results of the control with Instaspin Motion and its far from what it shows.
I noticed a saturation on the Iq_Ref_A followed by the stop of the motor when I applied my weight like in the video. So I tried increasing the USER_MOTOR_MAX_CURRENT parameter to compensate that. But when setting these parameter to 8 A or higher I lose complete control of the motor when applying load and the motor stops. Is it because of some hardware protection in the kit? My motor rated currrent is 6A and its rated speed is 3330 rpm.
Am I doing something wrong / missing something? Can I expect to solve my control problem using this lab? My user.h file is attached as well.
Thanks in advance for the help.
Vitor.