


Hello,
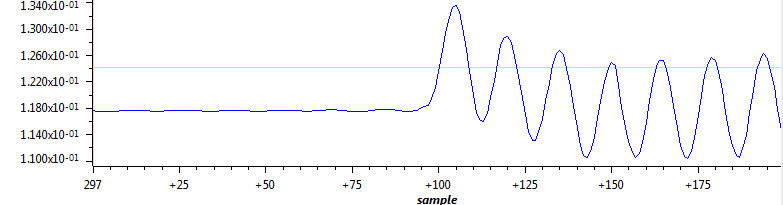
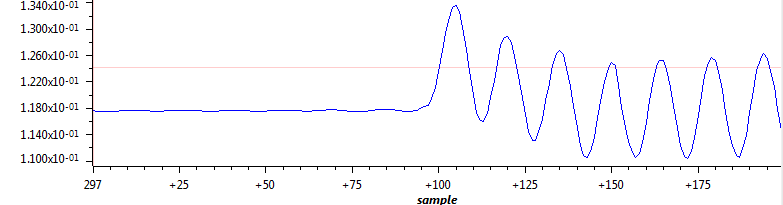
I am trying to enable online Rs-recalibration in order to estimate the motor temperature. I am using proj_lab07. When I set the speed to 1kRPM, the Rs_online variable is nice and stable. However, when I set the speed to 2 kRPM, the RsOnline_Ohm value starts to oscillate. I've logged RsOnline to show this; see the graph below. The first half is taken with 1kRPM; at around sample +90 I've changed the speed to 2kRPM.
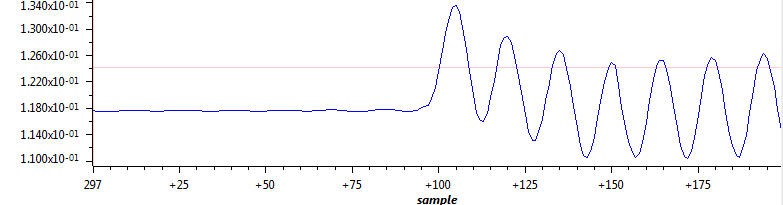
Is there anything I can do to stop the oscillating of RsOnline at higher RPMs?


{kind=link}
{kind=link}