Other Parts Discussed in Thread: LAUNCHXL-F28069M, DRV8301, BOOSTXL-DRV8301, LVSERVOMTR, CONTROLSUITE, LAUNCHXL-F28027F
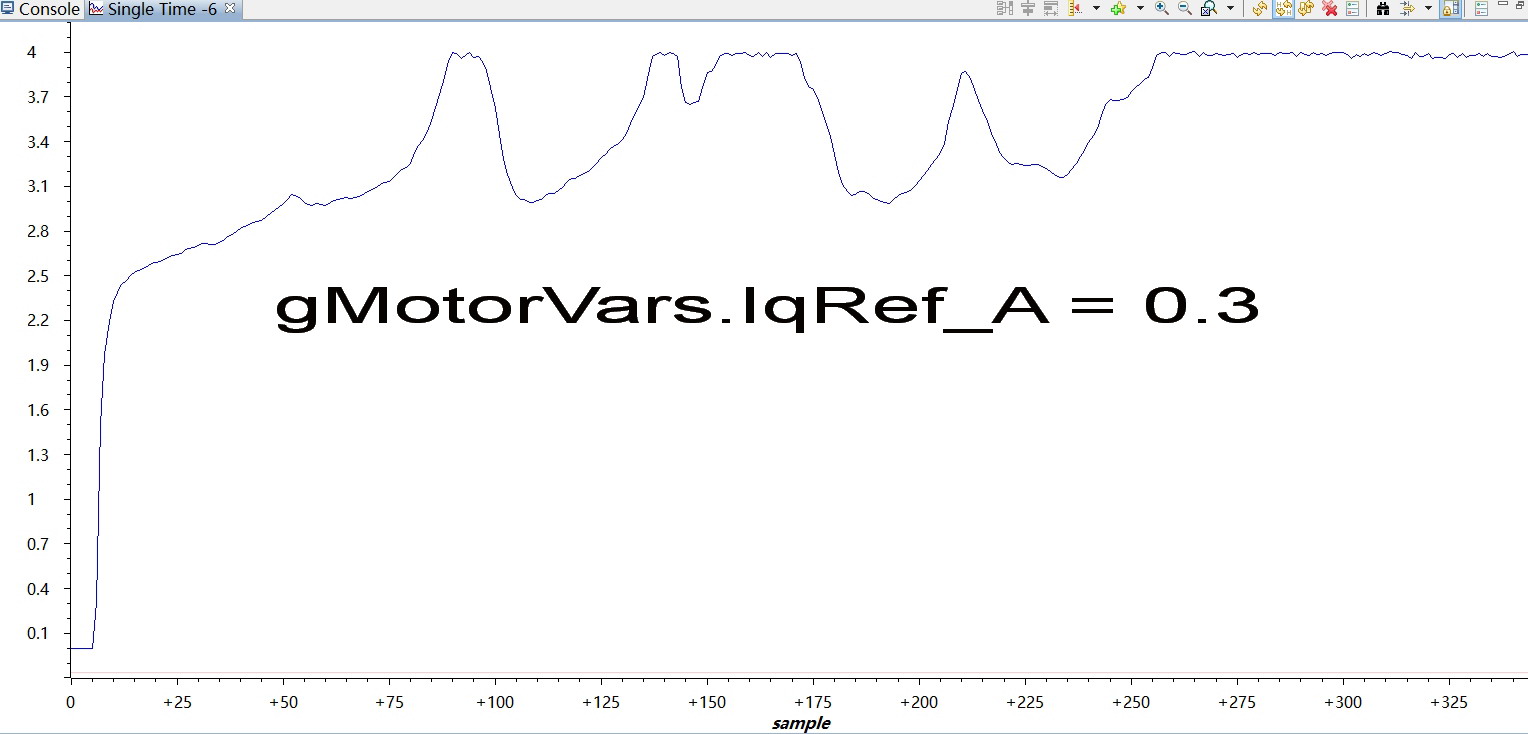
I used DRV8301-69M-KIT board to run the motor (LVSERVOMTR )by torque control in lab05a. When I set gMotorVars.IqRef_A = 0.2,the speed was stable(It was about 1000RPM).But when I set gMotorVars.IqRef_A = 0.24,the speed was mutational(Sometimes it was up to 6000RPM)! ! As shown:

I don't know what caused that.