


I have a small test program running on a F2810 and CCS5.5 and there is a timer ISR that fires every 1ms(but also tried 2ms, 4ms and 10ms but the problem seems unaffected), I saw in other postings that this issue has been related to stack issues and I do in fact see what appears to be garbage values in some of the automatic variables,(notice the "cmd" var is circled on the stack). The problem goes away when I comment out a call to routines that would put more on the stack, just by a deeper call tree, but this is just a small program with 1 or two variables in each routine, I can't believe the stack is full, non the less I increased the stack size in the .cmd file and this did not help. I realize that if I inadvertently wrote junk to the stack it's not good, so I checked but the code is not doing much.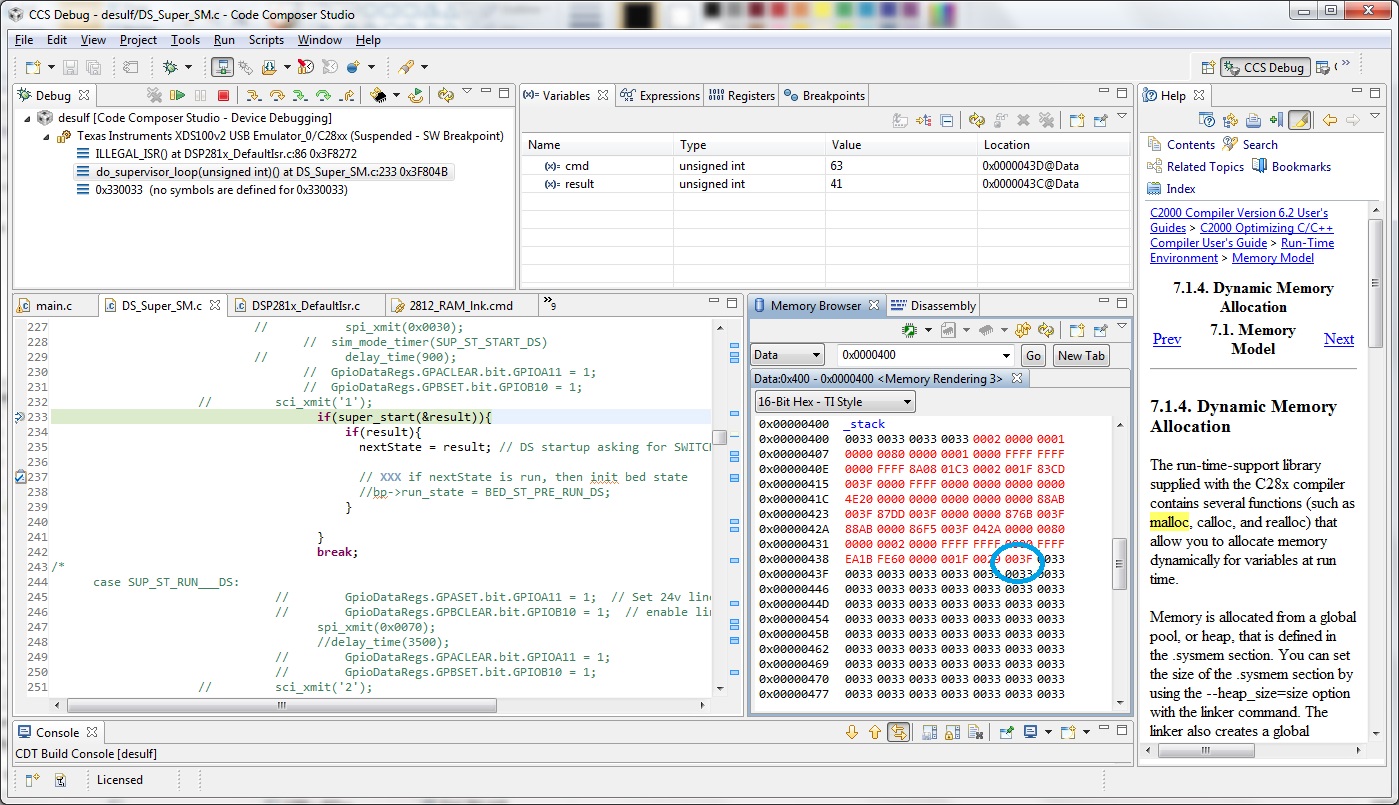
I suspect there is a problem in the setup of the timer ISR but this code is straight of the the Example_281xEvTimerPeriod.c(although I'm just using a single timer)
attached is a screen shot, I filled the stack memory area with 0x0033 and then ran it, so it looks like not much of the stack is used.
Any ideas would be welcomed!

