Other Parts Discussed in Thread: MOTORWARE
I’m testing a BLDC,AC 230V in, 2HP, 8 poles,2850RPM rated,application in water pumper. hardware referenct HVKIT. use mcu 28027F.
motorware version: motorware_1_01_00_14
ccs Version: 6.0.1.00040.
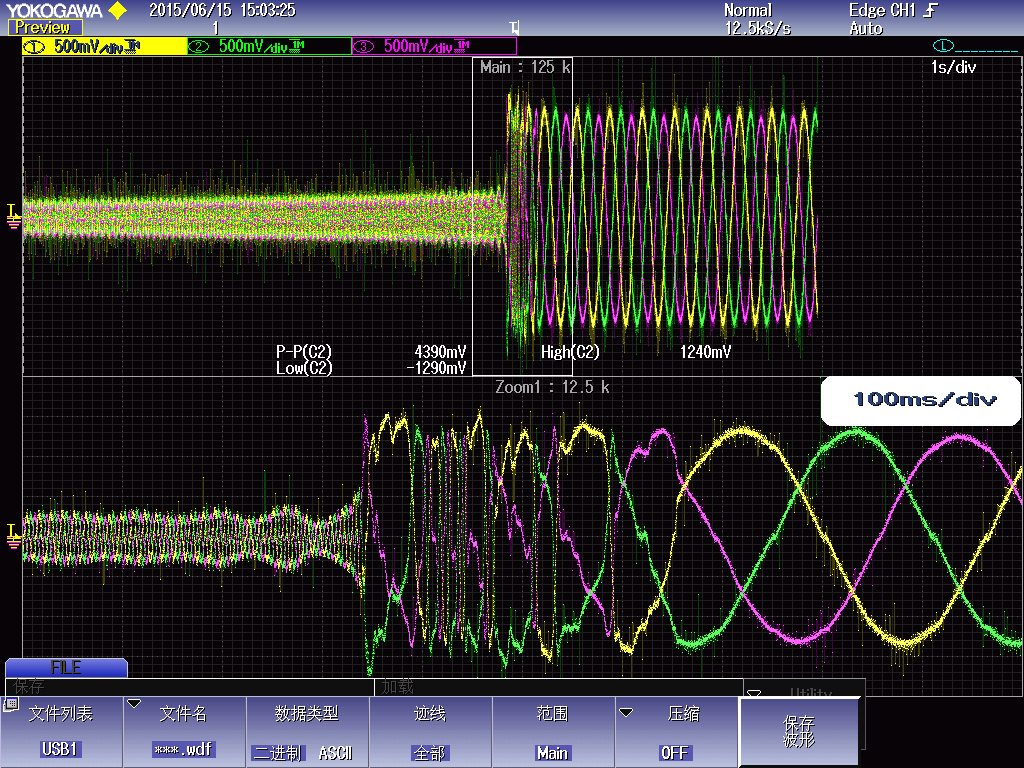
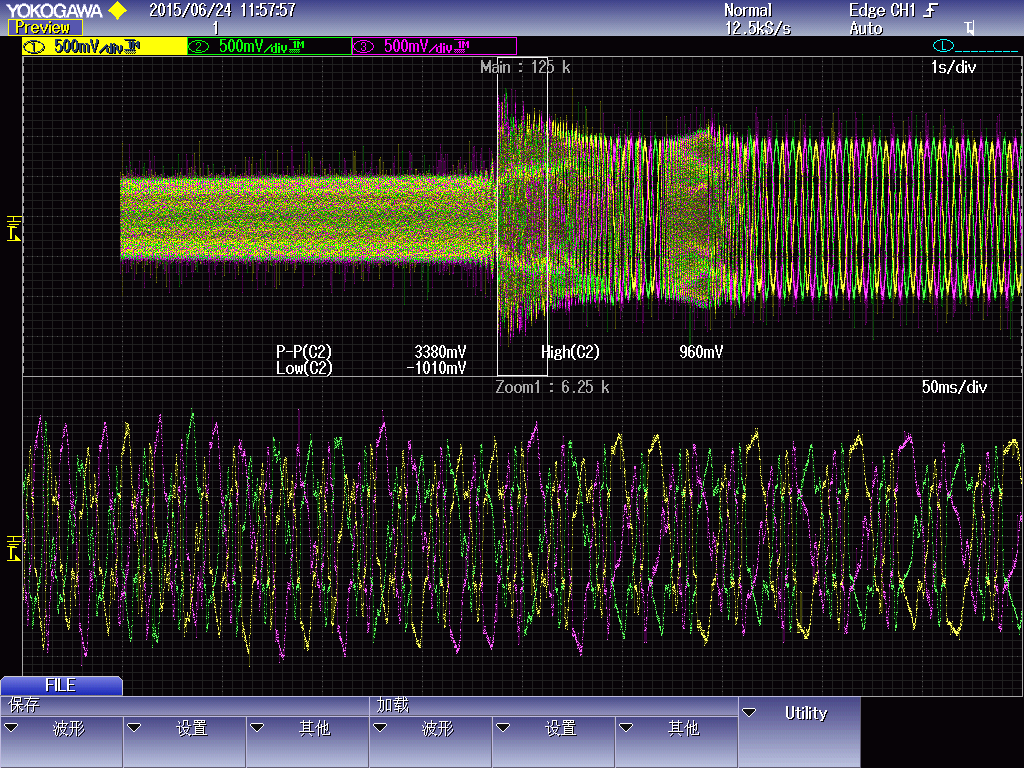
the following figure is an abnormal wave. in the cause of the water pumper acceleration. use lab09.
#define USER_IQ_FULL_SCALE_FREQ_Hz (500.0)
#define USER_IQ_FULL_SCALE_VOLTAGE_V (600.0)
#define USER_ADC_FULL_SCALE_VOLTAGE_V (440.06)
#define USER_IQ_FULL_SCALE_CURRENT_A (25.0)
#define USER_ADC_FULL_SCALE_CURRENT_A (46.89)
#define USER_NUM_CURRENT_SENSORS (3)
#define USER_NUM_VOLTAGE_SENSORS (3)
#define I_A_offset (0.9376856685)
#define I_B_offset (0.93725425)
#define I_C_offset (0.9360038638)
#define V_A_offset (0.2733021379)
#define V_B_offset (0.2727869749)
#define V_C_offset (0.271528542)
#define USER_SYSTEM_FREQ_MHz (60.0)
#define USER_PWM_FREQ_kHz (10.0)
#define USER_PWM_FREQ_kHz (10.0)
#define USER_NUM_CTRL_TICKS_PER_TRAJ_TICK (10)
#define USER_MAX_NEGATIVE_ID_REF_CURRENT_A (-0.5 * USER_MOTOR_MAX_CURRENT)
#define USER_VOLTAGE_FILTER_POLE_Hz (501.744)
#define USER_MOTOR_MAX_CURRENT (14.5)
what happend at that moment??? Many tests are like this. The pump is normal, there is no block.