


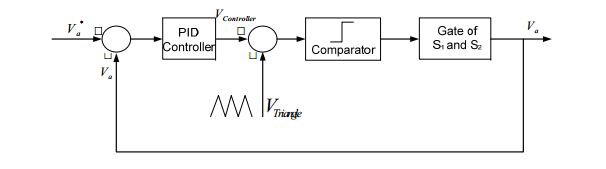
 I am using simulink and TI F28335 to implement close loop control logic via PID control.
I am using simulink and TI F28335 to implement close loop control logic via PID control.
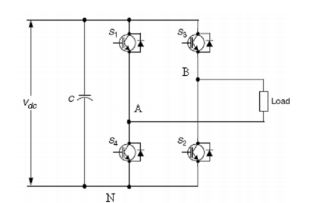
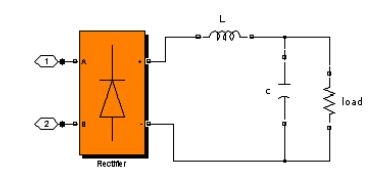
Inverter output voltage drops by 4V when i connect resistive load.
How to overcome this?

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.


