


Hi,
I am using TMDSRSLVR kit to measure angle to use with TMDSHVMTRPFCKIT. But there ware some issues with resolver kit. I have listed them below.
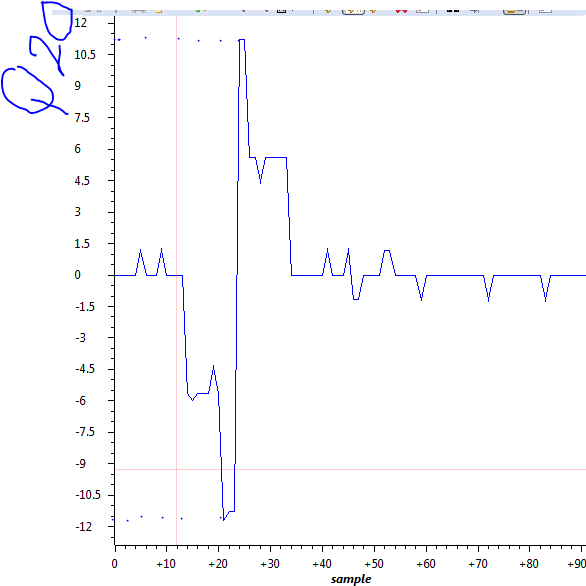
1) I can see only five discrete angle positions from rslvrOut.angleRaw per one resolver cycle. Those are -12, 5, 0, 5, 12, in iq20 format. And I can not see any other numbers between them. I have attached the graph of rslvrOut.angleRaw for a one resolver cycle. What should be the problem. Can't I get more angle values smoothly from the TMDSRSLVR kit.
I am running code with F28069 instead of F28027.
2) rslvrOut.angleOut is giving completely meaningless data. How can I calibrate that.
3) how can I use that angle to run motor in torque command mode with TMDSHVMTRPFCKIT kit.
Hope you all will help to solve the problem soon.
thanks


