Other Parts Discussed in Thread: DRV8301, MOTORWARE
hi,
I am using an boostxl- drv8301 kit with f28027F launchpad board and running a 8 poles(4 pair poles), 3krpm(max), 24vdc motor. but i can't get a suitable response.
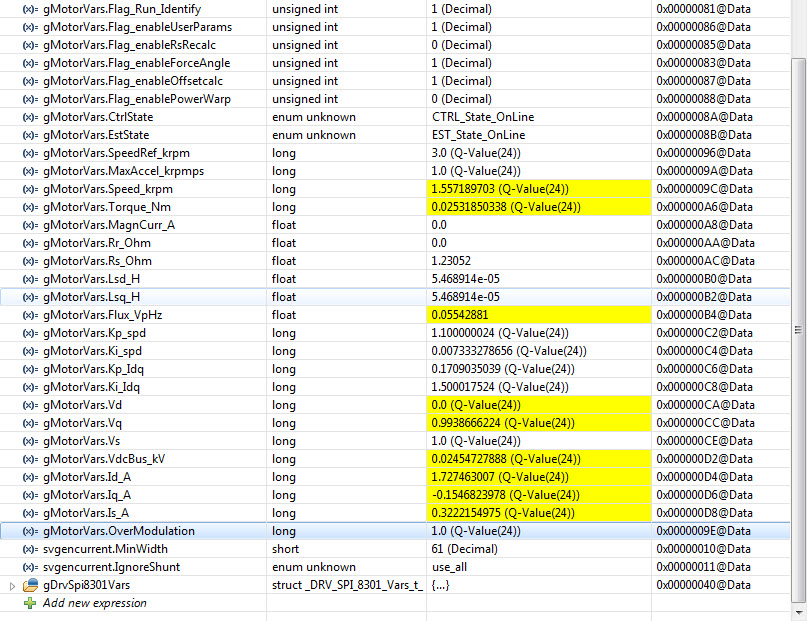
when i use identification procedure to identify the motor, Lsd and Lsq parameters do not assign correctly. ex: they assigned < 1.0e-6 that cause a fault in running motor. also this values differ in every time that i run the identification procedure.
meanwhile sometimes this params to valus bigger than 1.0e-6, but this values cause a other errors. for example motor run with shaking in low speed(60rpm) or it can reach to max speed(3000 rpm)
how can i achieve the motor parameters correctly?
thanks