Hi Chris,
We are using a lab5a project with the resolver angle pumped in using the TI's resolver kit. After weeks of work we have the motor controller running smoothly. But while we are trying to increase the torque of the motors, we are seeing the following issues.
1. After increasing the Iq Ref, is around 20, we see that suddenly the duty cycle goes down of the PWMs to about 90% or so, and the motor makes a hum, and motor stalls. At this point it draws about 5A. Our current controller is set up to handle 20A, What could be the issue that its doing this ? Shouldn't the controller be providing 20A or close to that at this much duty cycle ?
2. We also see that we only get a limited amount of torque. While trying to measure stalled torque, our maximum torque is only a fraction of what we are expecting. When increasing Iq Ref, we see the issue in point one above.
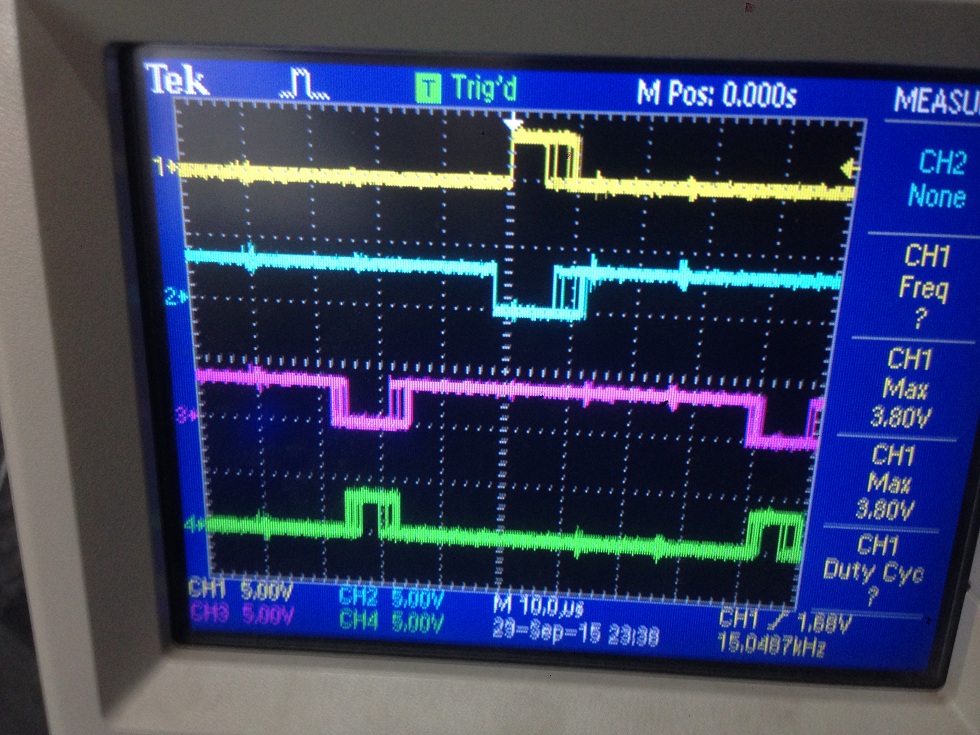
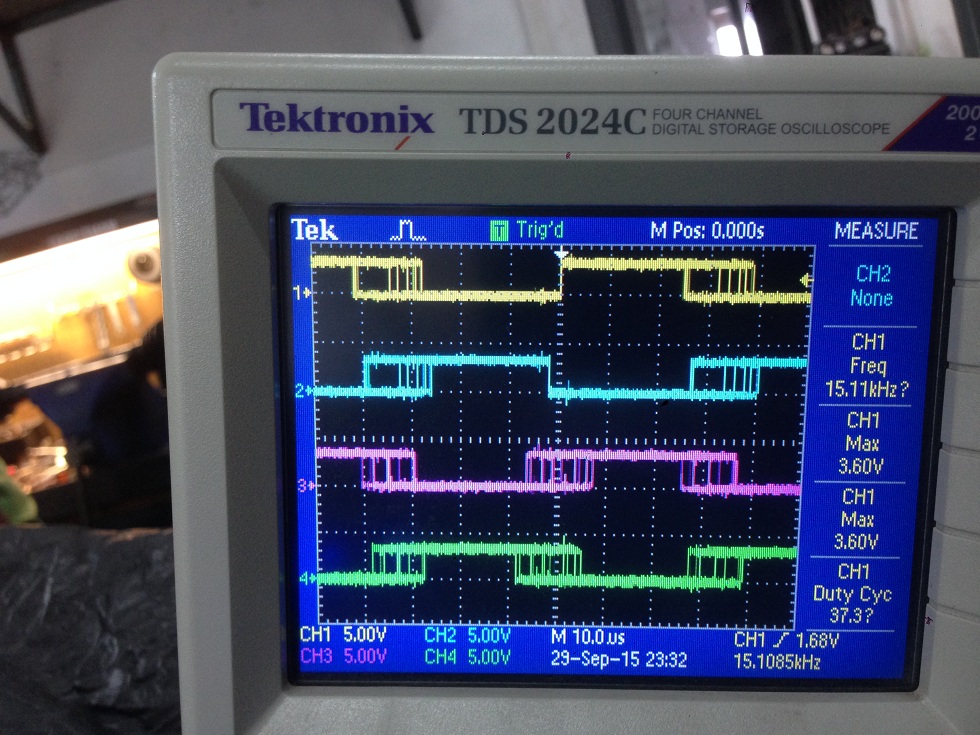
We tried increasing the voltage, but we see the same issue exactly around Iq Ref =20. Below we attach a screen shot of the scope while operating normally and while operating at that 90% duty cycle. This is a PMSM, with our inverter built based on the HVMTRPFCKIT.
Any help is much appreciated.