


I'm using the Launchpad XL (TMS230F28069M) with the BOOST-XL-DRV8301 REV B Motor Drive BoosterPack.
The PSU that i'm using for this board is 24 VDC.
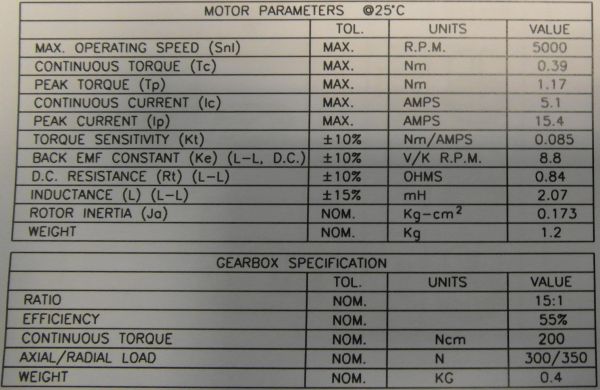
The motor is a BLDC motor with a 15:1 gearbox attached to it.
When i'm using a different BLDC motorcontroller i can get the speed up to around 2700 RPM with a PSU of 24V.
With InstaSPIN i can only get it to around 1300 RPM, i expected it to be about the same as the other controller.
I've attached my user.h and user_j1.h.
How can i reach around 2500 RPM like with the other controller?

