


I am using the 8-pole NEMA17 Motor that came with the DRV8312-C2 Kit. I loaded the DRV8312GUI_Main.c and set to run with BLDC Sensored (Motor Type 2). I then adjusted the GUISpeedRef to obtain a low RPM (about 250 RPM). I noticed that the hall sensor pulses are not of same length anymore.

What could be the cause for this?
I tested the motor using the InstapSPIN BLDC Gui, set to run about 0.04 PU or 250 RPM. Below is the plot. As you can see, the Hall sensor pulses are of same length.
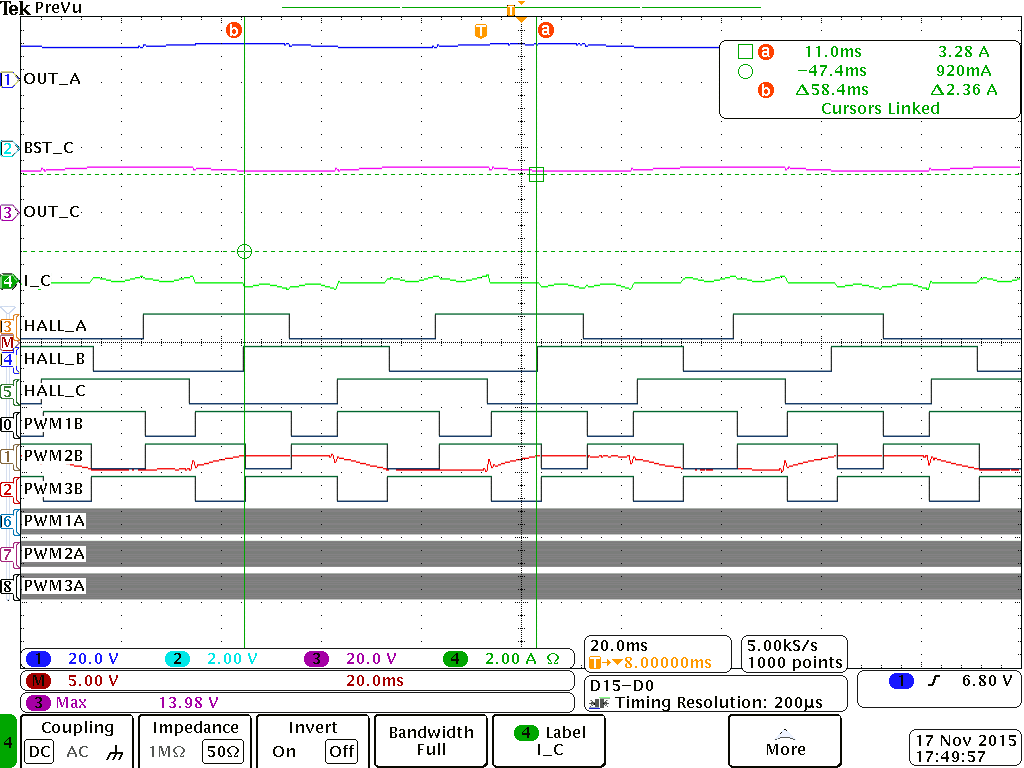
InstaSPIN BLDC doesnt use Hall Sensor data but based on the oscilloscope graph (the 2nd one), it shows that the motor runs smoothly. For the first oscilloscope graph, the motor is not running that smooth?
Can somebody shed light to this issue? What needs to be done to correct this?

