


I read through a couple posts, but I can't quite correlate our problem to anything on the forum.
We're using the 28069 to drive the exciter winding on a field-wound generator. We've gotten some great help so far, but we stumbled across this issue today.
The estimated speed doesn't seem to track well. Obviously, when the voltage and current feedback are low, the estimator cannot lock. We understand this, so we started turning up the field voltage, and as expected the estimator does "lock" above a certain threshold. However, as the voltage rises (and the speed stays constant), the estimated speed increases. We're getting the speed from EST_getSpeed_krpm. In all reality, we're using a modified version of Lab 4, so we're just picking the value from gMotorVars.speed_krpm, but that is regularly updated in the updateGlobals function.
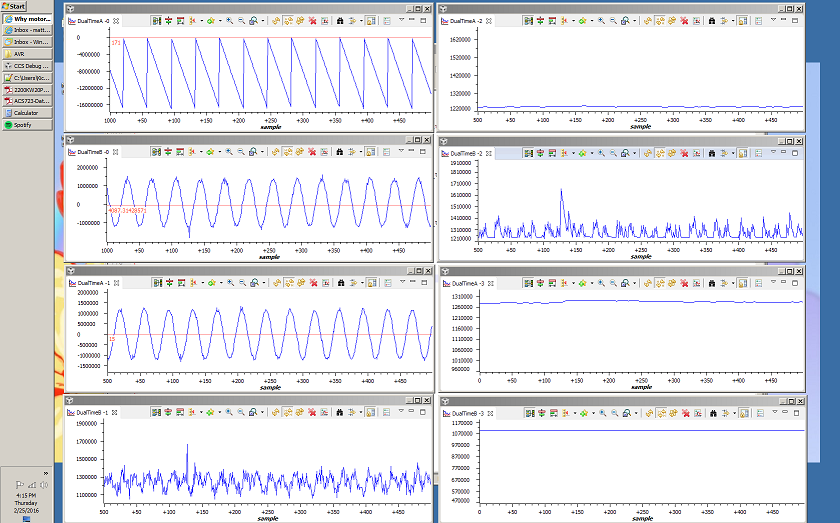
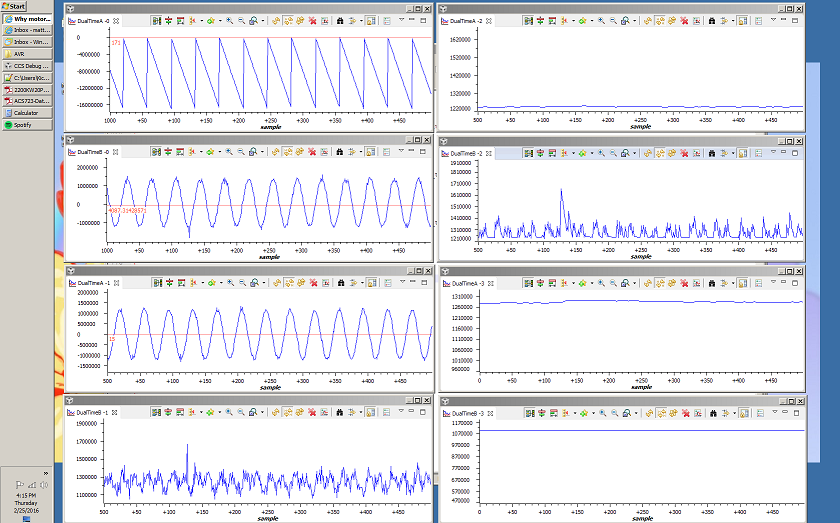
Our first thought was that the angle wasn't tracking well, but it seems that the angle is fine. I inserted an image below, which includes the estimator angle. The estimated angle is the top left plot. The window width is 500 samples at 6kHz, or 83ms, so with ~27 cycles, the electrical frequency is 166Hz. This is verified with an oscilloscope measuring the phase voltage and current. You can see that the angle is nicely-shaped, and seems to be tracking properly. It also matches the phase voltage frequency as measured by the A/D inputs (the second and third traces are Vb and Vc). The phase angle locks similarly across a wide range of phase voltages.
We have 10 pole pairs identified in user_j1.h, so we would expect the speed to be ~1000rpm, but with this particular test, the estimator was spitting out approximately -0.715krpm. Plus, as I mentioned, the estimated speed changes with the magnitude of phase voltage (the real speed stays at 166Hz electrical).
I guess my questions is: How does the estimator track speed? We thought it was a phase-locked loop using the flux angle, but after reading through the InstaSPIN documentation (spruhj1f), I don't see much discussion on this. Also, the voltage-dependence seems to contradict that thought.
Thanks for any insight.
Matt




{kind=link}