


Other Parts Discussed in Thread: MOTORWARE
Hi All, Hi Chris,
We are in a process of building igbt based high voltage, high current traction inverter using TMDSHVMTRPFCKIT solution. Motorware lab5a firmware is used to control the motor with some changes. A resolver is used to measure rotor angle which has connected to TMDSRSLVR kit. After calculating electrical angle, angle data is been sent to motorcontroller using SPI communication. We have added that electrical angle to CTRL_runOnLine and CTRL_runOnLine_User functions.
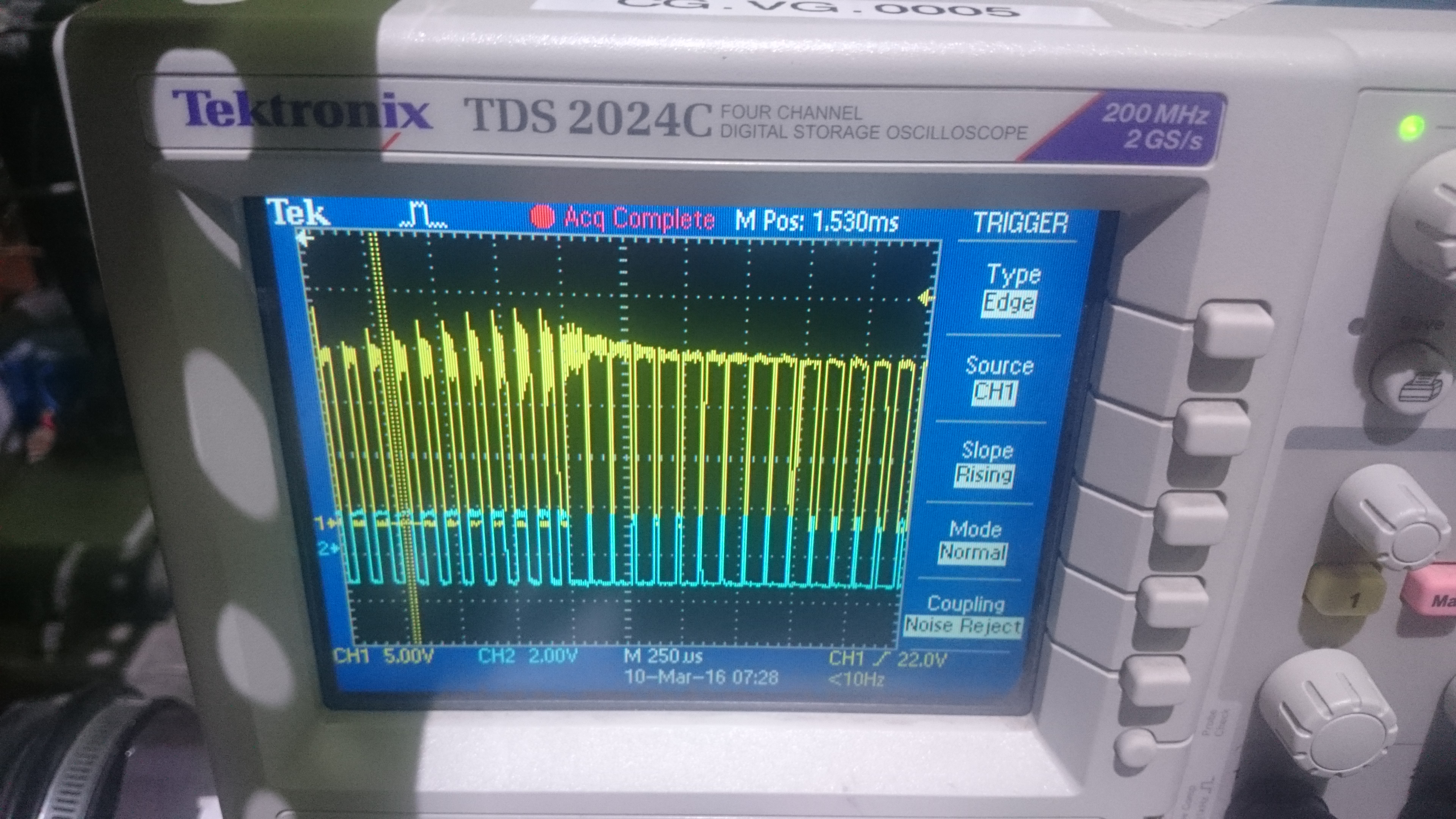
We have tested this inverter with 150Vbus and we saw something like this. When we started to rotate the motor, motor was running smoothly. There was no issue with that. But when we increased torque command (Iq_ref) after some torque level, motor sporadically makes a skipping noise. During the noise we see the wave forms below, where the DC bus voltage seems to oscillate. We have a 800uF DC link capacitor as well as sunbber capacitors on the IGBT legs.
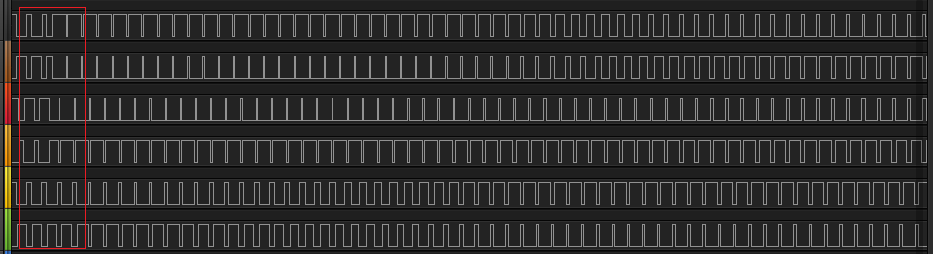
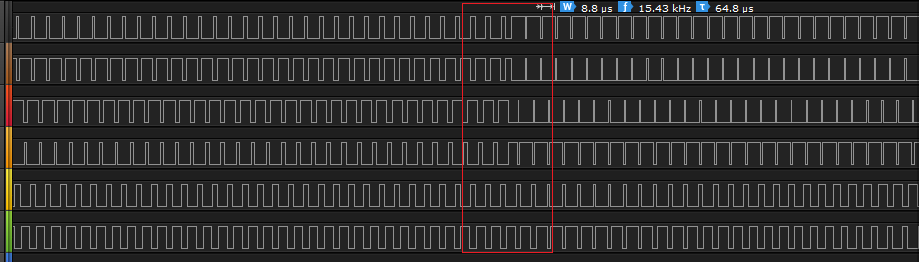
During the DC bus oscillations,we notice that the PWM signal duty cycles from the c2000 seem to stay static, and after the skipping noise it gets back to normal. And this continues sporadically, increasing the events with higher Torque Commands.
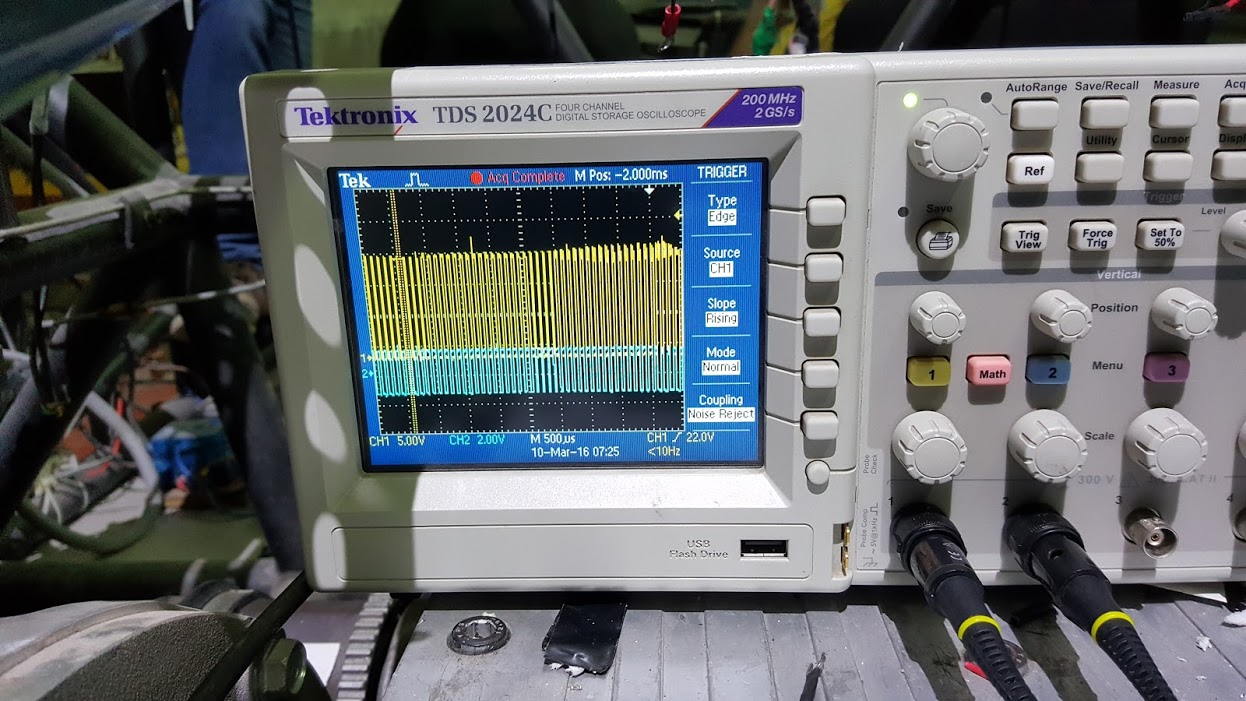
PWM output data from micro controller at fault time
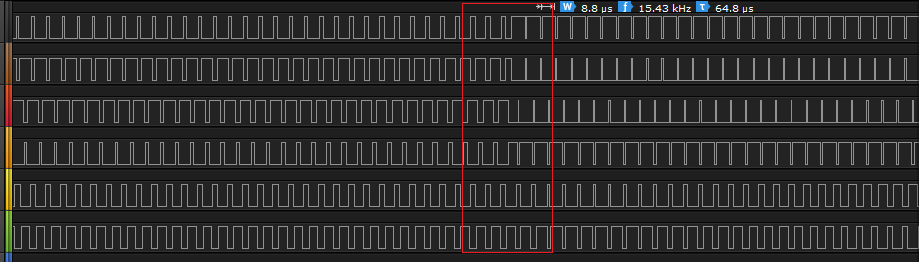
PWM output data from micro controller at fault time
Collector- Emitter waveform of a IGBT in inverter at fault time

Thank you.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}