


Other Parts Discussed in Thread: DRV8301, MOTORWARE
Hello.
I built a custom motor controller to run two motors using f28069M. I have problems getting motor to run (Lab2d for example).
Motor I am using is small BLDC with KV930.
During Id run, when gMotorVars.EstState = EST_State_Rs motor starts moving (As I undestand it should not) and current rises too high and causes power supply to reset (12 V, 5 A rating). I do not have such problems when using Launchpad with DRV8301 booster pack.
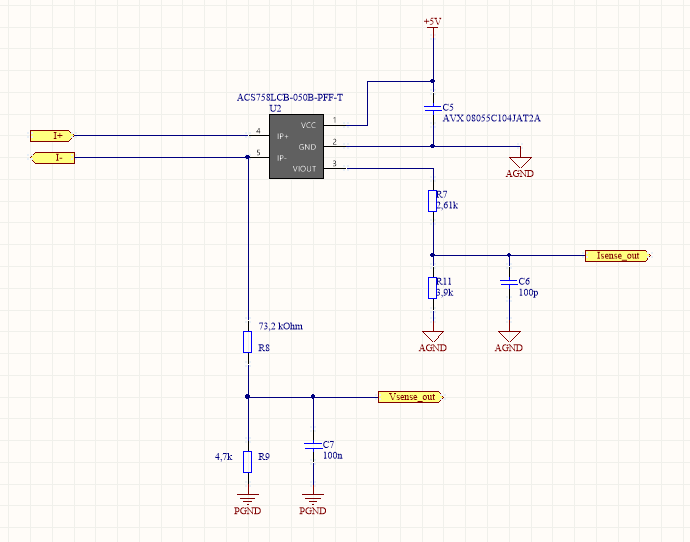
I use same connections (analog inputs and PWM signals) to the MCU as on F28069 Launchpad. I dont use DRV8301 and for current sensing I use Allegro ACS758 Hall sensors. In picture below is shown current and voltage measurement circuit. Each phase and DC bus has one.
Does anyone have any idea what could be wrong?
User.h file is modified using excel table that is included in motorware (V1.01.00.16) package.
I also put minus in hal.h file for bias -= OFFSET_getOffset(obj->offsetHandle_I[cnt]);
user.h (user_j1.h) file:
Measurement circuit (only one inverter unit attached):
Video demonstration:
F28027 Launchpad in video is used only for XDS100v2 connection.

