Hello all,
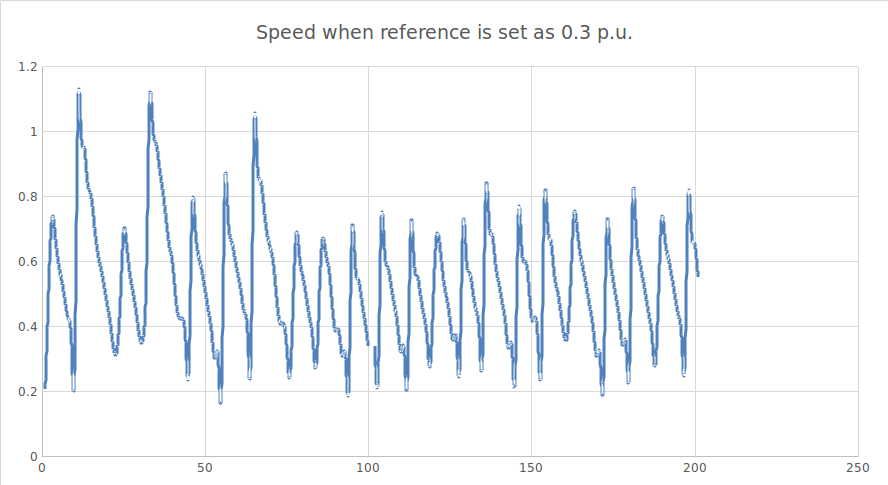
I have implemented all the six level builds in BLDC Sensored successfully. I have the tuned values of Kp and Ki for both current(level 5) and speed PI controllers (level 6). I tried to implement a cascade speed-current control where the speed controller will run at 10 times slower than the current controller (being the outer loop) and current controller to run at ISR freq. The speed PI output is given as reference to current PI controller. When i execute the program, the speed of the motor oscillates from 1.2 to 0.4 pu continuously (picture attached below). It could be seen vibrating on the table a lot. Changes in Kp, Ki for the outer speed loop doesn't seem to alter anything much. Please suggest a solution if anyone has tried or come across.
I would also like to add that when I change my speeed reference from 0.3 to 0.6 p.u., the average of the actual speed also roughly changes by the same amount though the oscillation in the speed waveform is still similar to the one attached below.