Other Parts Discussed in Thread: CONTROLSUITE
Visio-CAN block diagram 20160429.pdf
MY engineering group is fighting a CAN bus problem with one of the bus nodes using a TI TMS320F28335PGFA
and CAN dual transceiver ON Semi AMIS42700WCGA4H detecing CRC errors, Stuff errors and Form Errors on the bus.
The errors seems to be detected infrequently roughly every 15 seconds during a constantly repeating cycle of
communication. We are using a 1Mbit/s baud rate but we have tried half that speed as well of 500Kbit/s with
this change not yielding an perceptible difference in error generation.
I have attached a block diagram of the network topology. The other devices being used on the bus are some
ELMO whistles (MCU and CAN transceiver not known to us) and other boards using a ST Micro STM32F103T6U6A
and SN65HVD231D.
Here are some details from another engineer in our group:
-----------
The goal is to run this configuration at 1MBit/sec, with a bus utilization of a little over 50%. In my testing,
I have found that I consistently get CAN bus errors with this configuration, usually Stuff errors and Form errors.
If I remove a device from the bus, the errors go away
If I decrease the bus utilization, the errors go away
If I decrease the bus speed to 500 kBit/sec, the errors do NOT go away
The wires are all hand-twisted pair, each cable is less than 6 inches long, no shielding
The transceivers are a mixture of 3V and 5V
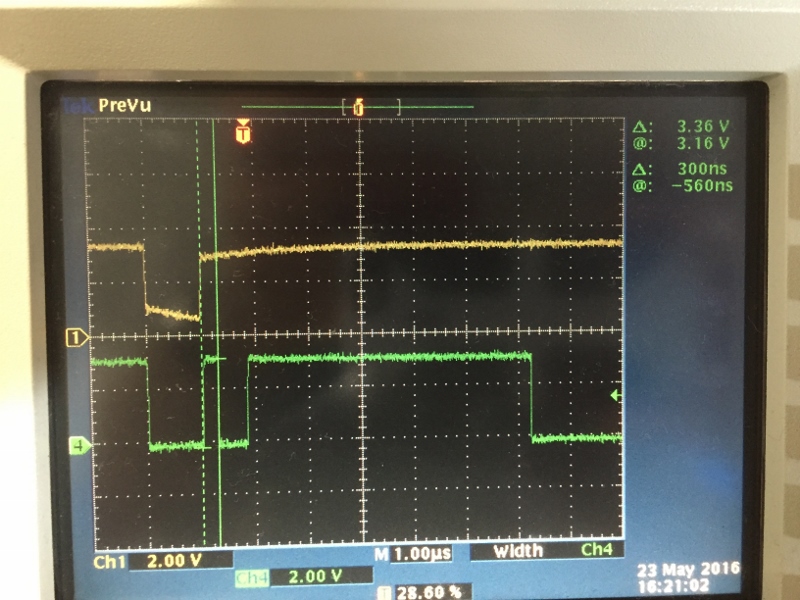
I have scoped the CAN H and CAN L signals, and the difference is consistently either 0V or 2.1V to 2.5V, which is well over the CAN spec of 1.5V difference
I have confirmed that the 120 Ohm termination resistors are in place as shown in the diagram
-----------
We have also tried removing the ON Semi AMIS42700WCGA4H abd just using a single CAN driver SN65HVD231D off of
the TI TMS320F28335PGFA with no improvements. We also tried removing the ELMOs from the bus, just TI TMS320F28335PGFA
and ST Micro STM32F103T6U6A nodes with no improvements.
I am wondering if there is not a problem with either how the CAN controller on the TMS320F28335PGFA is being
configured or if the controller is getting false detects. We have tried looking at the CAN controller detects for the ST Micro
part and we are not getting any errors on it, understanding of course that, that the TI DSP is receiving most of the
traffic as it is acting as the initator for all the messaging on the bus.
I have read some of the related threads in this forum but I couldn't find anything that pinpointed the issue:
e2e.ti.com/.../481812
e2e.ti.com/.../492272
e2e.ti.com/.../1736817
Can anybody help?