


Hi, I'm trying to run the PM Sensorless demo on a 28069 Launchpad with BoostXL-DRV8301. The aim is, later, to run two motors with one Launchpad and then substitute the BoostXL with the DRV8301-HC-C2-KIT to finally connect two bigger motors.
But currently I'm stuck at buildlevel1 of the example. The Svgen signals (Ta, Tb, Tc) I should watch look terrible and this is no wonder: the SIne and Cosine inputs of the IPARK module aren't alright.
Sine:
Cosine:
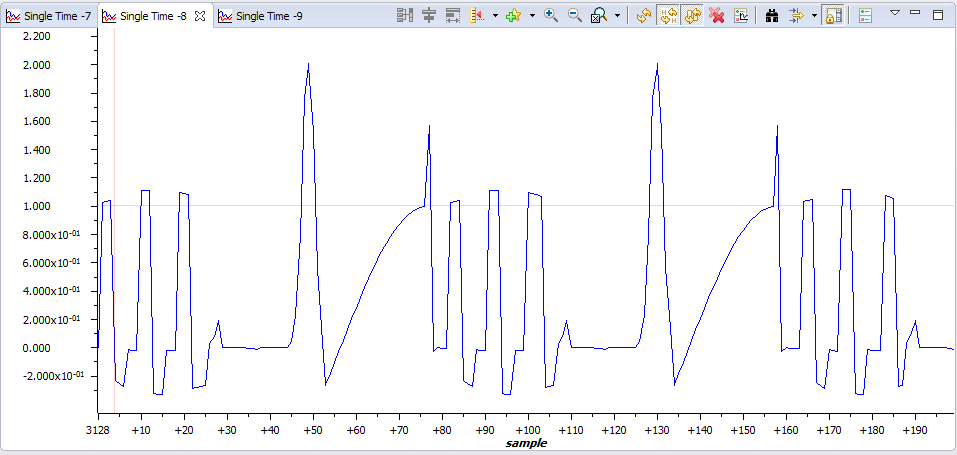
This while the generated unit-angle smoothly increases from 0 to 1 and then falls back.
Sine and Cosine values are claculated on lines 719-720 of the code, which I'm using as it is (I didn't do any modifications) and thus I suppose should work properly.

Are some Math libraries outdated or any other numerical problems in F28069??

