Hi everyone,
I have some trouble with my C program on CCS studio.
I'm using the F28069 microcontroller and I'm trying to follow the Lab7_10.c Example that I have attached here.
The difference compared to this one is that I'm using a function generator in order to generate the square train of pulses (not the PWM module of the microcontroller) , so I just connect the GPIO24 eCAP to the output of the function generator (1KHz - 1Vpp).
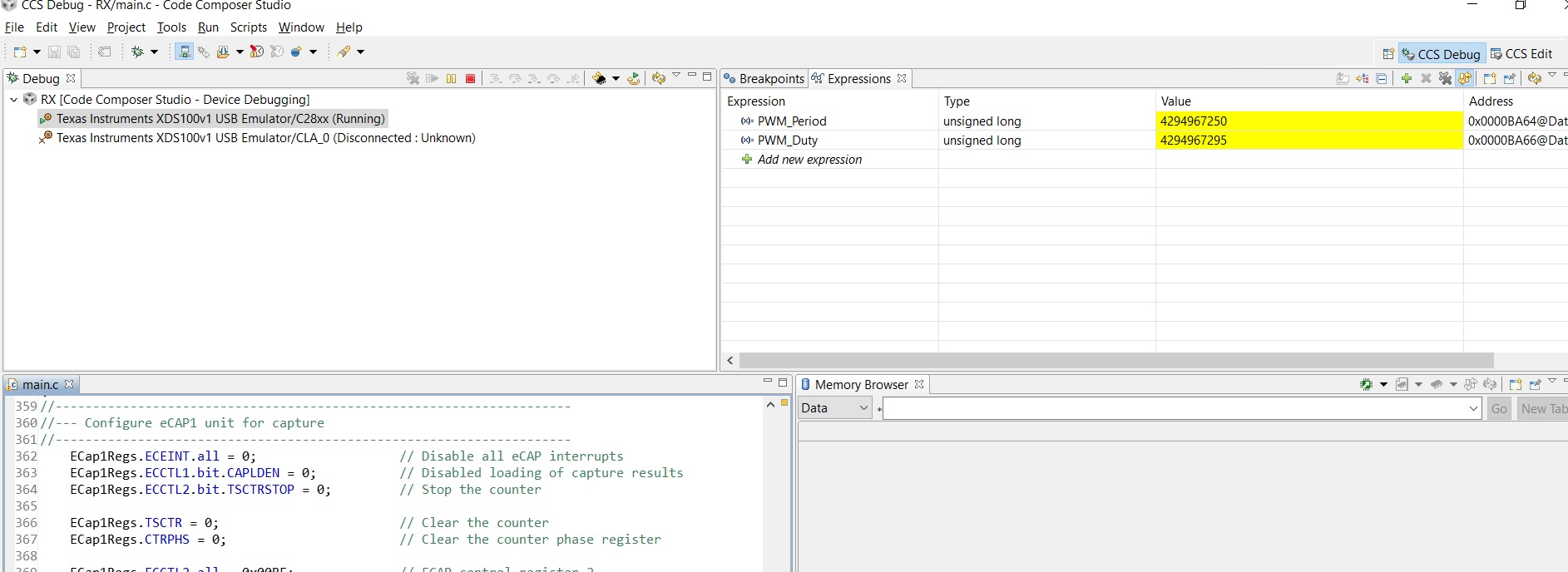
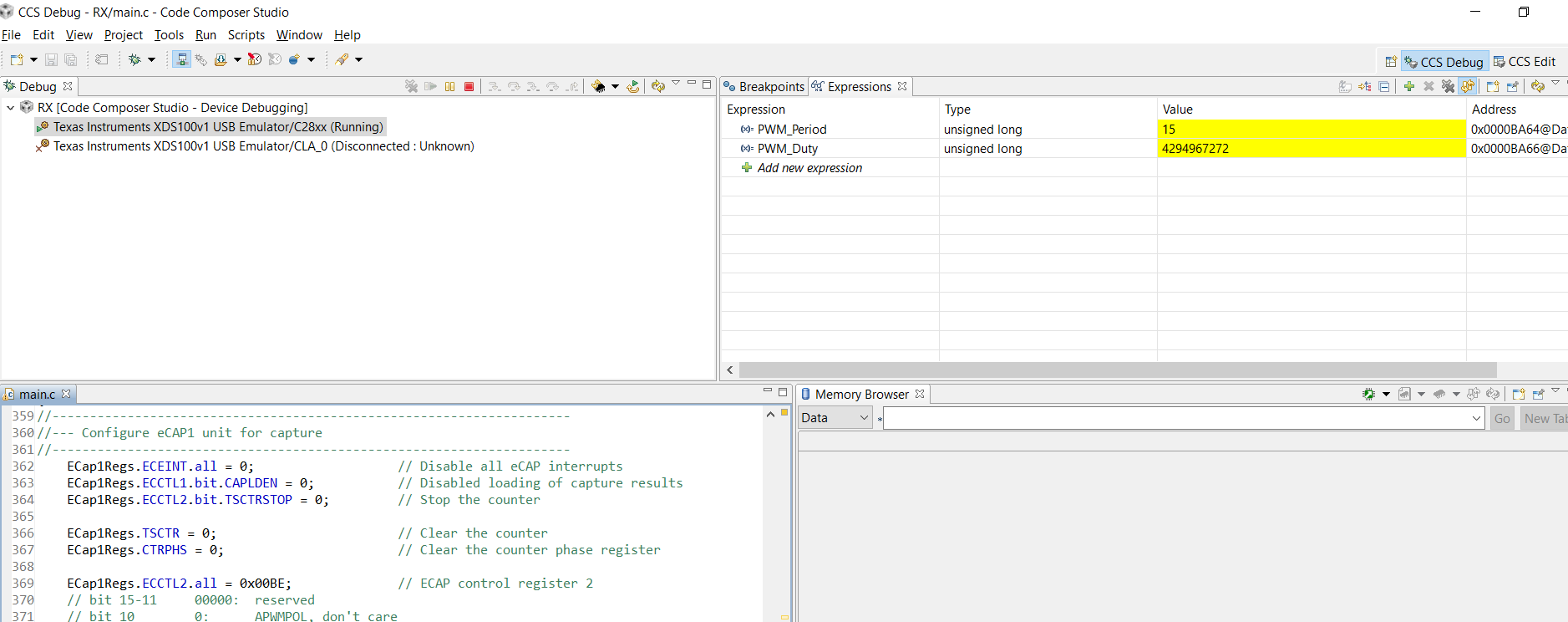
The problem is that when I print PWM_Duty and PWM_Period they do not correspond to the values generated from the function generator, rather, these values are meaningless.
Can someone help me with this program?
Thanks in advance,
Best,
Andrea
//
// Lab7_10: TMS320F28335
// (c) Frank Bormann
//
//###########################################################################
//
// FILE: Lab7_10.c
//
// TITLE: DSP28335ControlCARD; ePWM1A 1KHz output
// and measurement with eCAP1
// solution file for Lab7_10
//###########################################################################
// Ver | dd mmm yyyy | Who | Description of changes
// =====|=============|======|===============================================
// 3.0 | 12 May 2009 | F.B. | Lab7_10 for F28335;
// 3.1 | 11 Nov 2009 | F.B | Lab7_10 for F28335 and PE Revision 5
//###########################################################################
#include "DSP2833x_Device.h"
// external function prototypes
extern void InitSysCtrl(void);
extern void InitPieCtrl(void);
extern void InitPieVectTable(void);
extern void InitCpuTimers(void);
extern void ConfigCpuTimer(struct CPUTIMER_VARS *, float, float);
// Prototype statements for functions found within this file.
void Gpio_select(void);
void Setup_ePWM1A(void);
void Setup_eCAP1(void);
interrupt void cpu_timer0_isr(void);
interrupt void eCAP1_isr(void);
// Global Variables
Uint32 PWM_Duty;
Uint32 PWM_Period;
//###########################################################################
// main code
//###########################################################################
void main(void)
{
int counter=0; // binary counter for digital output
InitSysCtrl(); // Basic Core Init from DSP2833x_SysCtrl.c
EALLOW;
SysCtrlRegs.WDCR= 0x00AF; // Re-enable the watchdog
EDIS; // 0x00AF to NOT disable the Watchdog, Prescaler = 64
DINT; // Disable all interrupts
Gpio_select(); // GPIO9, GPIO11, GPIO34 and GPIO49 as output
// to 4 LEDs at Peripheral Explorer Board
Setup_ePWM1A(); // init ePWM1A
Setup_eCAP1(); // init eCAP1
InitPieCtrl(); // basic setup of PIE table; from DSP2833x_PieCtrl.c
InitPieVectTable(); // default ISR's in PIE
EALLOW;
PieVectTable.TINT0 = &cpu_timer0_isr;
PieVectTable.ECAP1_INT= &eCAP1_isr;
EDIS;
InitCpuTimers(); // basic setup CPU Timer0, 1 and 2
ConfigCpuTimer(&CpuTimer0,150,100000);
PieCtrlRegs.PIEIER1.bit.INTx7 = 1; // Enable CPU Timer 0 INT
PieCtrlRegs.PIEIER4.bit.INTx1 = 1; // Enable ECAP1_INT in PIE group 4
IER |= 0x0009; // Enable INT4 and INT1
EINT;
ERTM;
CpuTimer0Regs.TCR.bit.TSS = 0; // start timer0
while(1)
{
while(CpuTimer0.InterruptCount == 0);
CpuTimer0.InterruptCount = 0;
EALLOW;
SysCtrlRegs.WDKEY = 0x55; // service WD #1
EDIS;
counter++;
if(counter&1) GpioDataRegs.GPASET.bit.GPIO9 = 1;
else GpioDataRegs.GPACLEAR.bit.GPIO9 = 1;
if(counter&2) GpioDataRegs.GPASET.bit.GPIO11 = 1;
else GpioDataRegs.GPACLEAR.bit.GPIO11 = 1;
if(counter&4) GpioDataRegs.GPBSET.bit.GPIO34 = 1;
else GpioDataRegs.GPBCLEAR.bit.GPIO34 = 1;
if(counter&8) GpioDataRegs.GPBSET.bit.GPIO49 = 1;
else GpioDataRegs.GPBCLEAR.bit.GPIO49 = 1;
}
}
void Gpio_select(void)
{
EALLOW;
GpioCtrlRegs.GPAMUX1.all = 0; // GPIO15 ... GPIO0 = General Puropse I/O
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1; // ePWM1A active
GpioCtrlRegs.GPAMUX2.all = 0; // GPIO31 ... GPIO16 = General Purpose I/O
GpioCtrlRegs.GPAMUX2.bit.GPIO24= 1; // eCAP1 active
GpioCtrlRegs.GPBMUX1.all = 0; // GPIO47 ... GPIO32 = General Purpose I/O
GpioCtrlRegs.GPBMUX2.all = 0; // GPIO63 ... GPIO48 = General Purpose I/O
GpioCtrlRegs.GPCMUX1.all = 0; // GPIO79 ... GPIO64 = General Purpose I/O
GpioCtrlRegs.GPCMUX2.all = 0; // GPIO87 ... GPIO80 = General Purpose I/O
GpioCtrlRegs.GPADIR.all = 0;
GpioCtrlRegs.GPADIR.bit.GPIO9 = 1; // peripheral explorer: LED LD1 at GPIO9
GpioCtrlRegs.GPADIR.bit.GPIO11 = 1; // peripheral explorer: LED LD2 at GPIO11
GpioCtrlRegs.GPBDIR.all = 0; // GPIO63-32 as inputs
GpioCtrlRegs.GPBDIR.bit.GPIO34 = 1; // peripheral explorer: LED LD3 at GPIO34
GpioCtrlRegs.GPBDIR.bit.GPIO49 = 1; // peripheral explorer: LED LD4 at GPIO49
GpioCtrlRegs.GPCDIR.all = 0; // GPIO87-64 as inputs
EDIS;
}
void Setup_ePWM1A(void)
{
EPwm1Regs.TZCTL.all = 0;
EPwm1Regs.TBCTL.bit.CLKDIV = 0; // CLKDIV = 1
EPwm1Regs.TBCTL.bit.HSPCLKDIV = 1; // HSPCLKDIV = 2
EPwm1Regs.TBCTL.bit.CTRMODE = 2; // up - down mode
EPwm1Regs.AQCTLA.all = 0x0006; // ZRO = set, PRD = clear
EPwm1Regs.TBPRD = 37500; // 1KHz - PWM signal
}
void Setup_eCAP1(void)
{
//---------------------------------------------------------------------
//--- Configure eCAP1 unit for capture
//---------------------------------------------------------------------
ECap1Regs.ECEINT.all = 0; // Disable all eCAP interrupts
ECap1Regs.ECCTL1.bit.CAPLDEN = 0; // Disabled loading of capture results
ECap1Regs.ECCTL2.bit.TSCTRSTOP = 0; // Stop the counter
ECap1Regs.TSCTR = 0; // Clear the counter
ECap1Regs.CTRPHS = 0; // Clear the counter phase register
ECap1Regs.ECCTL2.all = 0x0096; // ECAP control register 2
// bit 15-11 00000: reserved
// bit 10 0: APWMPOL, don't care
// bit 9 0: CAP/APWM, 0 = capture mode, 1 = APWM mode
// bit 8 0: SWSYNC, 0 = no action (no s/w synch)
// bit 7-6 10: SYNCO_SEL, 10 = disable sync out signal
// bit 5 0: SYNCI_EN, 0 = disable Sync-In
// bit 4 1: TSCTRSTOP, 1 = enable counter
// bit 3 0: RE-ARM, 0 = don't re-arm, 1 = re-arm
// bit 2-1 11: STOP_WRAP, 11 = wrap after 4 captures
// bit 0 0: CONT/ONESHT, 0 = continuous mode
ECap1Regs.ECCTL1.all = 0x01C4; // ECAP control register 1
// bit 15-14 00: FREE/SOFT, 00 = stop TSCTR immediately
// bit 13-9 00000: PRESCALE, 00000 = divide by 1
// bit 8 1: CAPLDEN, 1 = enable capture results load
// bit 7 1: CTRRST4, 1 = reset counter on CAP4 event
// bit 6 1: CAP4POL, 0 = rising edge, 1 = falling edge
// bit 5 0: CTRRST3, 0 = do not reset counter on CAP3 event
// bit 4 0: CAP3POL, 0 = rising edge, 1 = falling edge
// bit 3 0: CTRRST2, 0 = do not reset counter on CAP2 event
// bit 2 1: CAP2POL, 0 = rising edge, 1 = falling edge
// bit 1 0: CTRRST1, 0 = do not reset counter on CAP1 event
// bit 0 0: CAP1POL, 0 = rising edge, 1 = falling edge
ECap1Regs.ECEINT.all = 0x0008; // Enable desired eCAP interrupts
// bit 15-8 0's: reserved
// bit 7 0: CTR=CMP, 0 = compare interrupt disabled
// bit 6 0: CTR=PRD, 0 = period interrupt disabled
// bit 5 0: CTROVF, 0 = overflow interrupt disabled
// bit 4 0: CEVT4, 0 = event 4 interrupt disabled
// bit 3 1: CEVT3, 1 = event 3 interrupt enabled
// bit 2 0: CEVT2, 0 = event 2 interrupt disabled
// bit 1 0: CEVT1, 0 = event 1 interrupt disabled
// bit 0 0: reserved
}
interrupt void cpu_timer0_isr(void)
{
CpuTimer0.InterruptCount++;
EALLOW;
SysCtrlRegs.WDKEY = 0xAA; // service WD #2
EDIS;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
interrupt void eCAP1_isr(void)
{
ECap1Regs.ECCLR.bit.INT = 1; // Clear the ECAP1 interrupt flag
ECap1Regs.ECCLR.bit.CEVT3 = 1; // Clear the CEVT3 flag
// Calculate the PWM duty period (rising edge to falling edge)
PWM_Duty = (int32)ECap1Regs.CAP2 - (int32)ECap1Regs.CAP1;
// Calculate the PWM period (rising edge to rising edge)
PWM_Period = (int32)ECap1Regs.CAP3 - (int32)ECap1Regs.CAP1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP4; // Must acknowledge the PIE group 4
}
//===========================================================================
// End of SourceCode.
//===========================================================================