


Hi,
I already know and use with success the Instaspin ID process to identify several ACIM motor with the HV eval kit and also with my custom board.
One of my customer ask us to work only with the motor nameplate because:
- He can do so with it's current VFC (FOC) from Schneider.
- He can change it's motor provider with an equivalent motor depending on it's supply chain.
- For sustaining old equipment he can change a motor on the field with a equivalent ACIM motor found on a local provider.
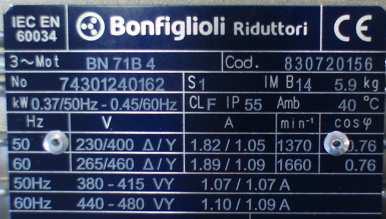
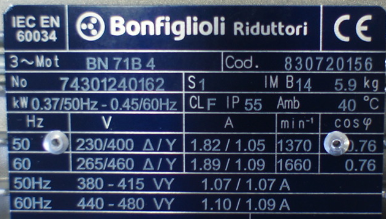
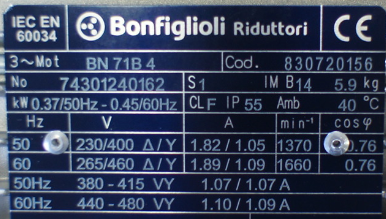
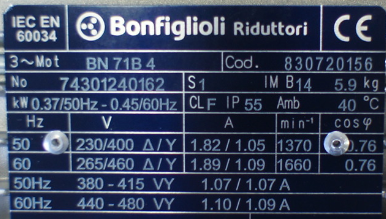
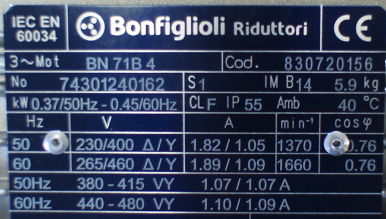
Do you know a way to compute the mandatory parameter from a name plate like the following one?
Best regards,
Paul




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}