


Kit: DRV8312EVM Rev D
GUI:Instaspin-FOC Motorware Instrumentation
Control card: F2802 (Piccolo A)
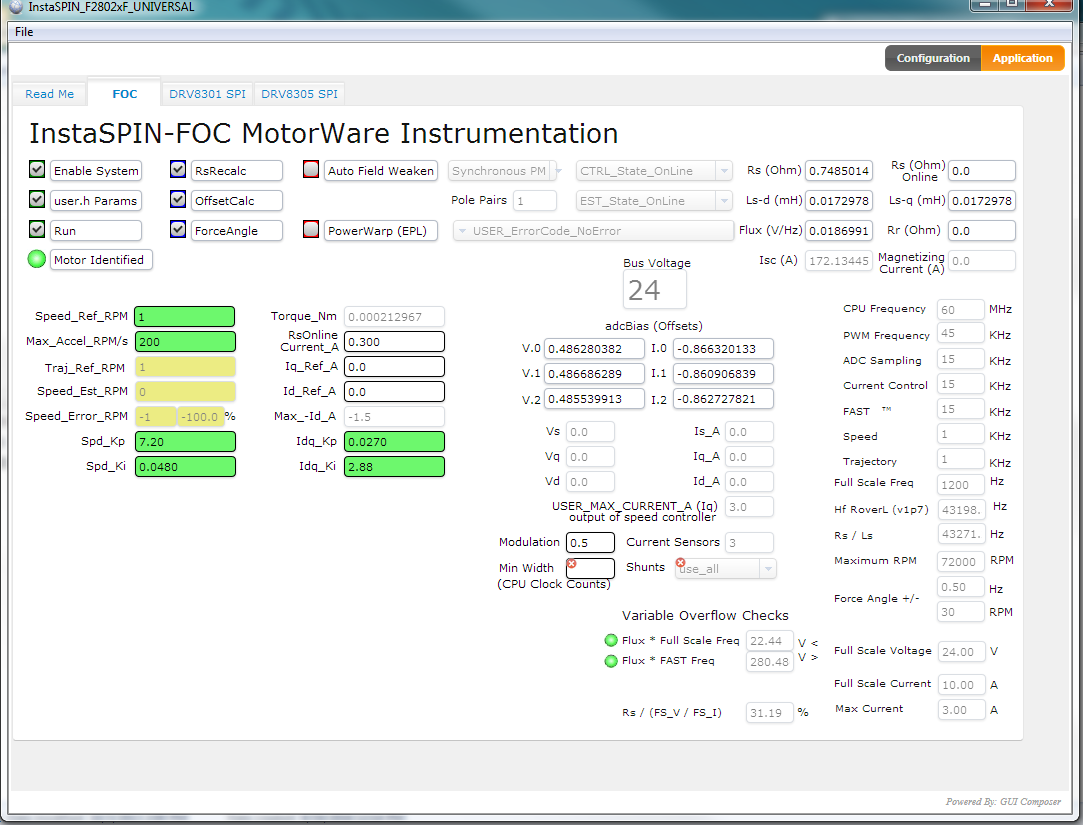
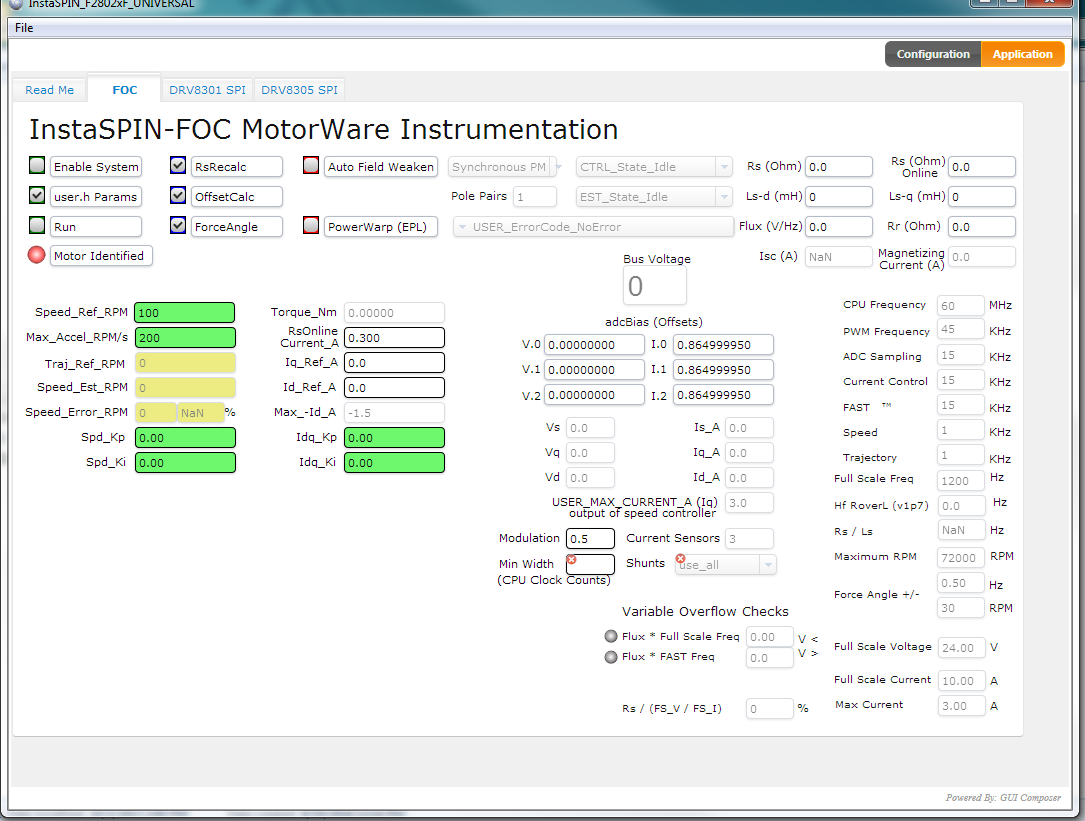
I want to run a 24 V 30K rpm bldc motor .I tried ID using program 5b,but during identification the RoverL is always equal to 2000.
And the motor sanity check failed for Rs/Ls.
according to GUI Quick Start guide Instaspin Universal ,I tried to attempt ID using lab 2c but still RoverL came around 12000.
The USER_R_OVER_L_EST_FREQ_Hz is already set at 300.
How should I go further ? Please help


 I am g
I am g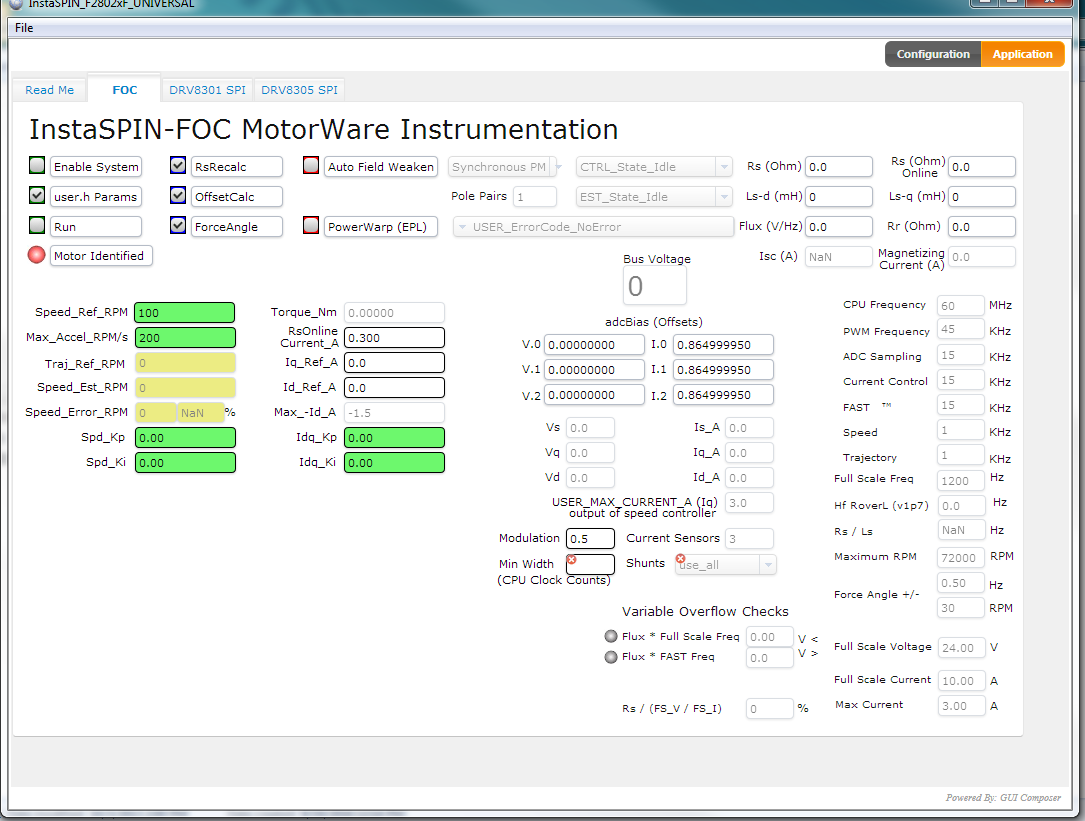
{kind=link}