Hi
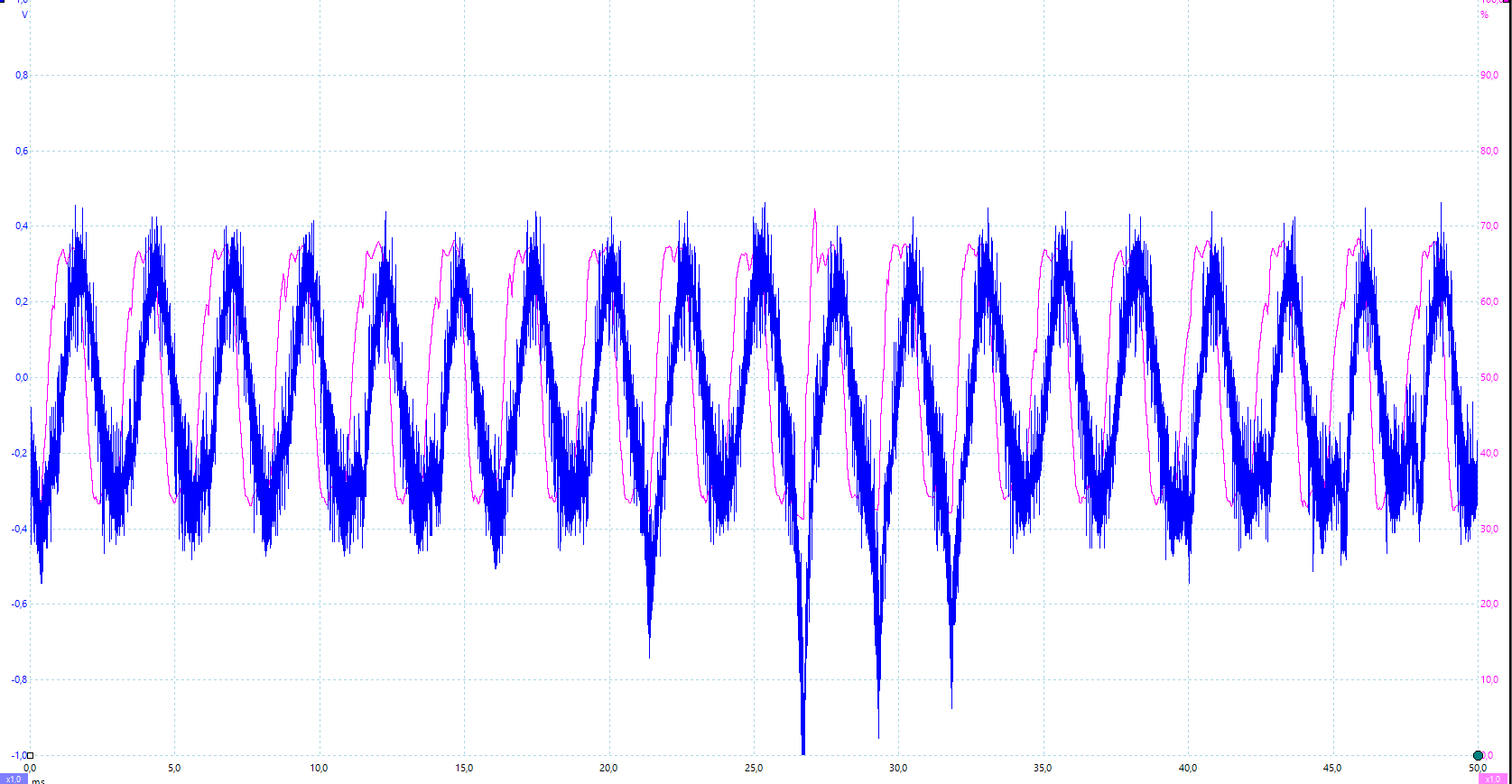
I developed a hardware based on kit DRV8301 RevD using am TMS32028062F (90MHz) prozessor. I have some problems running a motor between 70k RPM and 100k RPM: The current wave form (measured with a current clamp) begins to jump which cause ends in overcurrent after some time. I have two motors from different manufacturer. I have no problem with the weaker one. Maybe because I'm able to operate with a lower Id current.
I'm not sure if the motor parameters are correct because most time lab2b failed to detect Ls_d and Ls_q. Any tips to run a proper ACIM motor identification? Furthermore I'm not sure if the voltage measurement is correct at higher speed because the filter is designed for a lower frequency (USER_VOLTAGE_FILTER_POLE_Hz = 335.648). How do I validate the voltage measurement? Or are the PI-Controller bad optimized?
I set USER_IQ_FULL_SCALE_VOLTAGE_V to bus voltage (48V DC). Is the purpose of this value to limit the voltage if wanted?
About the flux calculation: user.c (USER_MOTOR_RATED_FLUX < (USER_IQ_FULL_SCALE_VOLTAGE_V / (float_t)USER_EST_FREQ_Hz / 0.05)) limits the calculated flux to a value of 0.4 (= 48 / 24kHz / 0.05). My calculation: 0.816 * 48V / 1666Hz = 0.023. Is this calculation correct? I'm running mainISR @ 24kHz so I set ratedFlux to 0.4. Does this setting have any negative side effects?
I recognized that FAST estimates a lower Speed than measured: @ 51k RPM mueasured FAST estimates 50k RPM; @ 103k RPM measured FAST estimates 100k RPM. Is this variation in tolerance or is it a hint that any setting or motor-Id has a wrong value?
Motor:
- Type: ACIM; One Pole Pair
- Max Speed: 100k RPM (1666Hz)
- Rated Flux: 0.023 (I have to use a value of 0.04 caused through the "low" ISR frequency)
- Rated Current: 3.5A
- Max Current: Weak motor 11A; Strong motor: 16A
- Ls_d/Ls_q: Weak motor: ~20uH; Strong motor: ~100uH
- Bus Voltage: 48V DC
Hardware:
- Frequency PWM: 24kHz
- Frequency ISR: 24kHz
- Inverter: DRV8301
- Current measurement optimized for 20A max (8mOhm Shunt)
- Voltage measurement filter copied from DRV8301_RevD kit (USER_VOLTAGE_FILTER_POLE_Hz = 335.648
Software:
- Based on lab11a
- No PowerWarp; No Rs-Online
- Overmodulation: 0.5774 (100% Duty Cycle)
- USER_IQ_FULL_SCALE_VOLTAGE_V = 48V
Regards Andreas