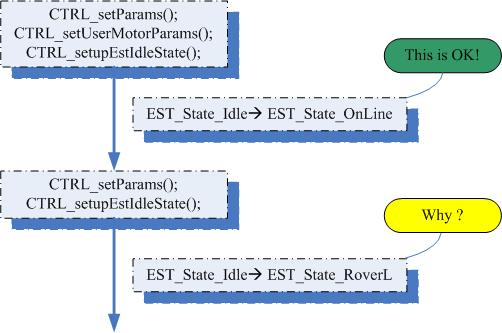
After call CTRL_setParams(), CTRL_setUserMotorParams() and CTRL_setupEstIdleState() function, the estimator state can change from EST_State_Idle to EST_State_OnLine. But then if CTRL_setParams() and CTRL_setupEstIdleState() function are called again, the estimator state will change from EST_State_Idle to EST_State_RoverL. Why ?
Through debugging, the function CTRL_setUserMotorParams( ) should be called again to solve this problem. But I do not know why it is.