


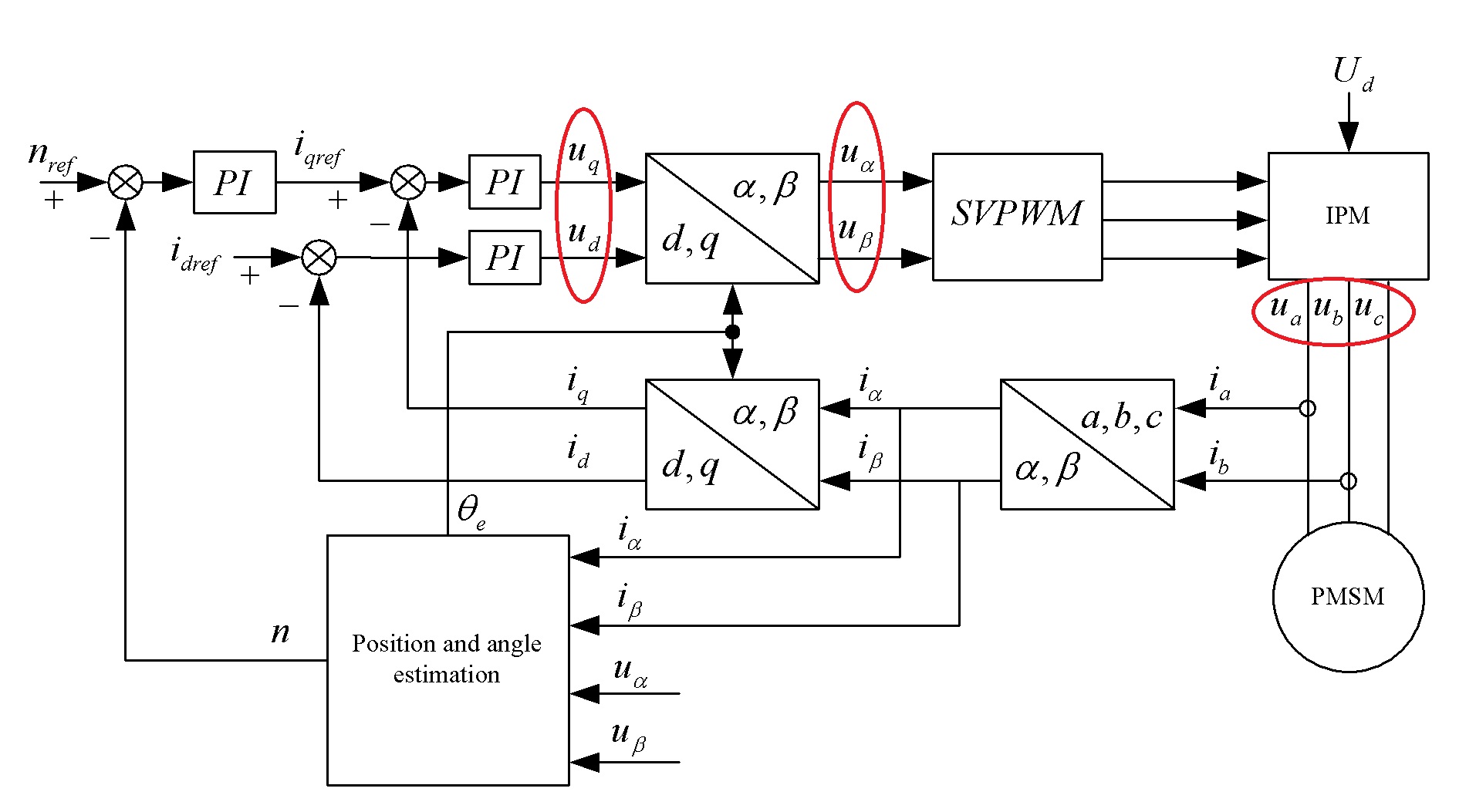
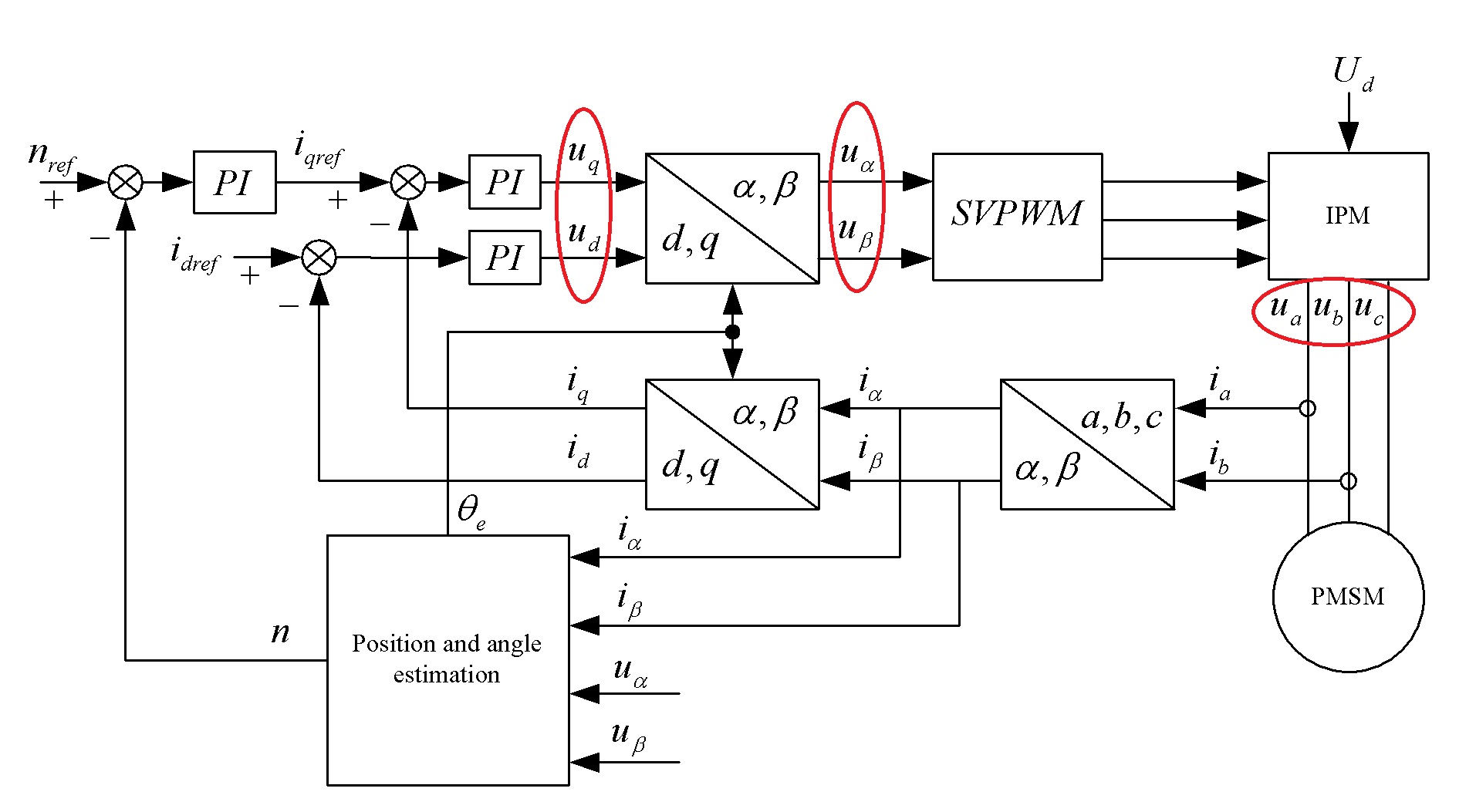
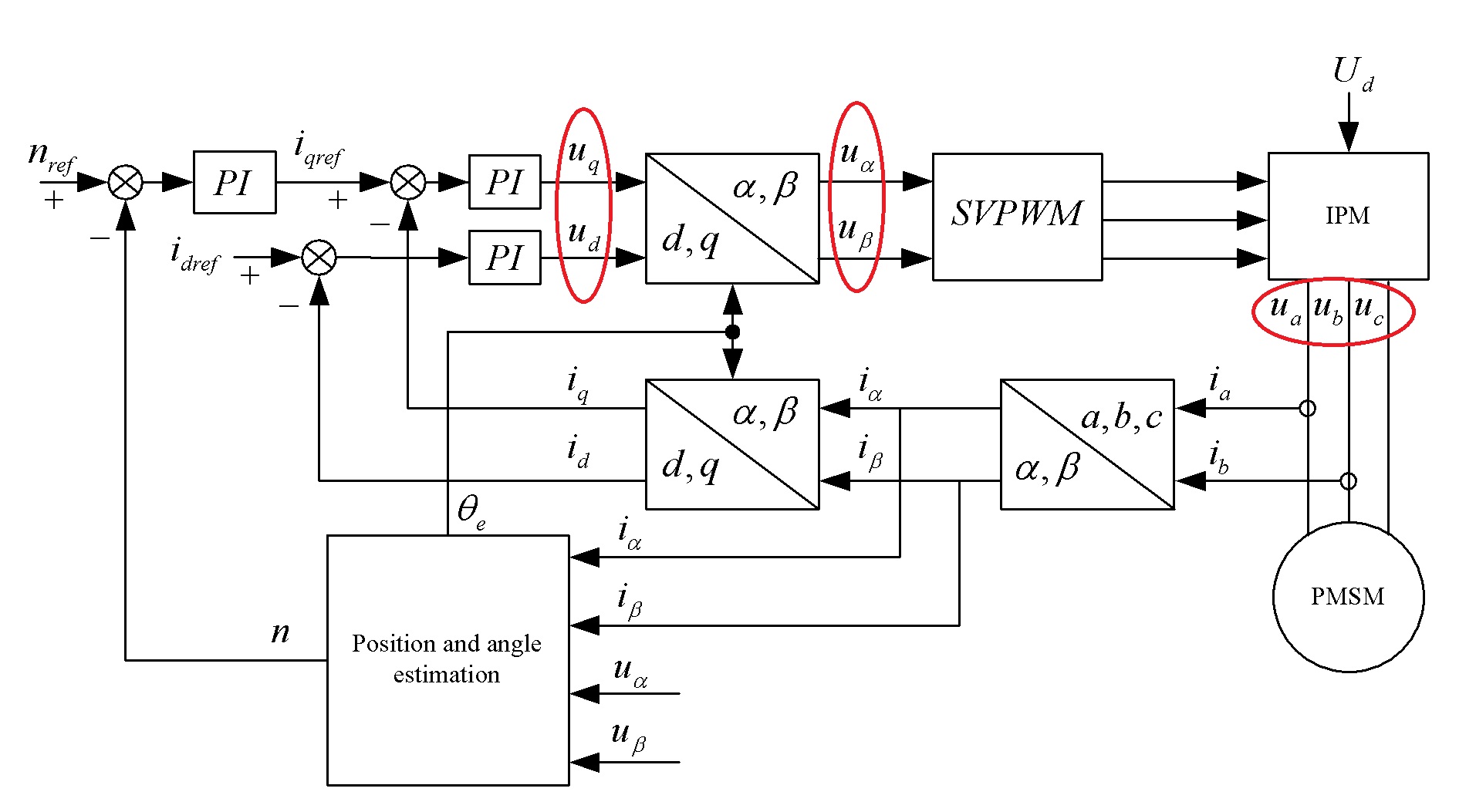
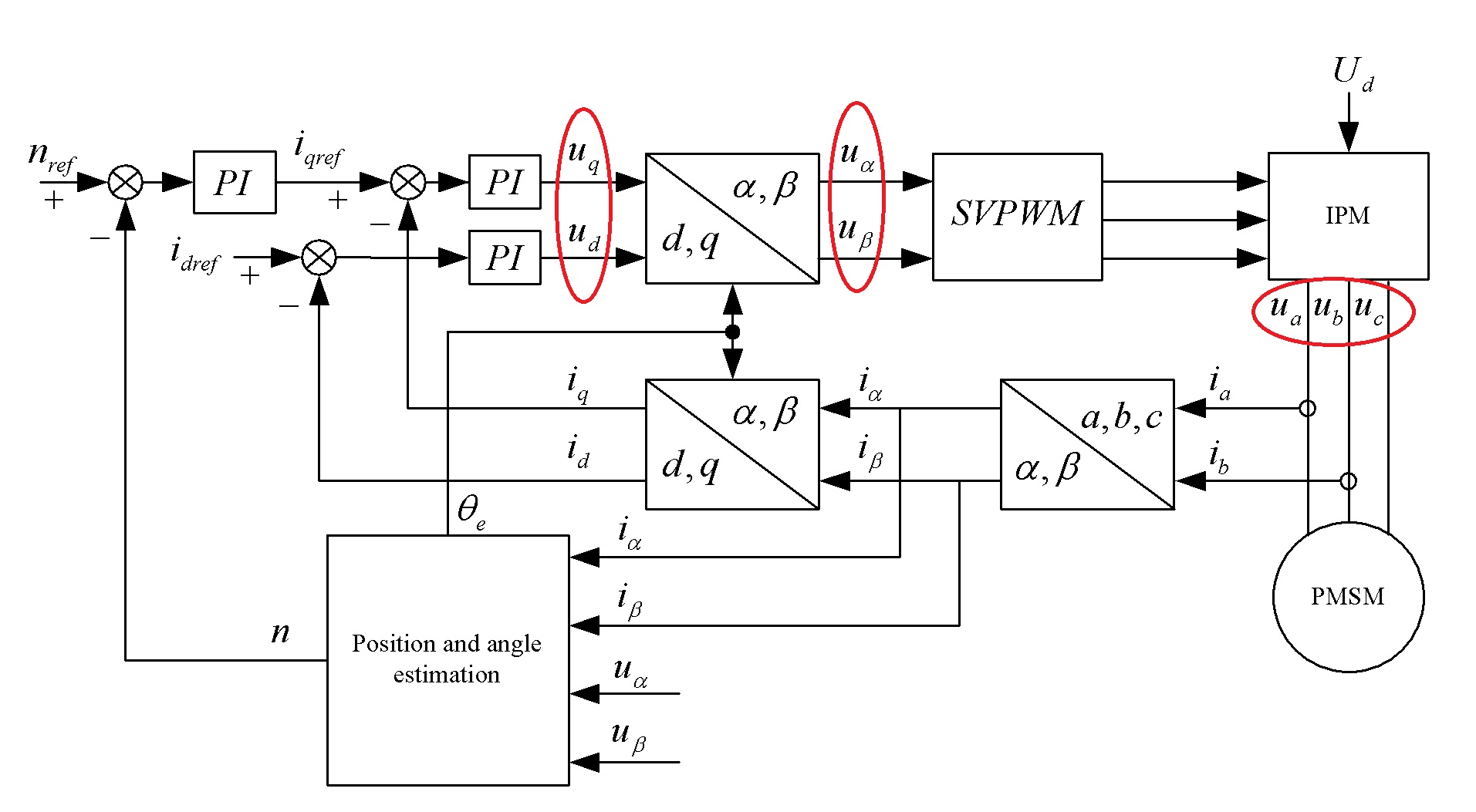
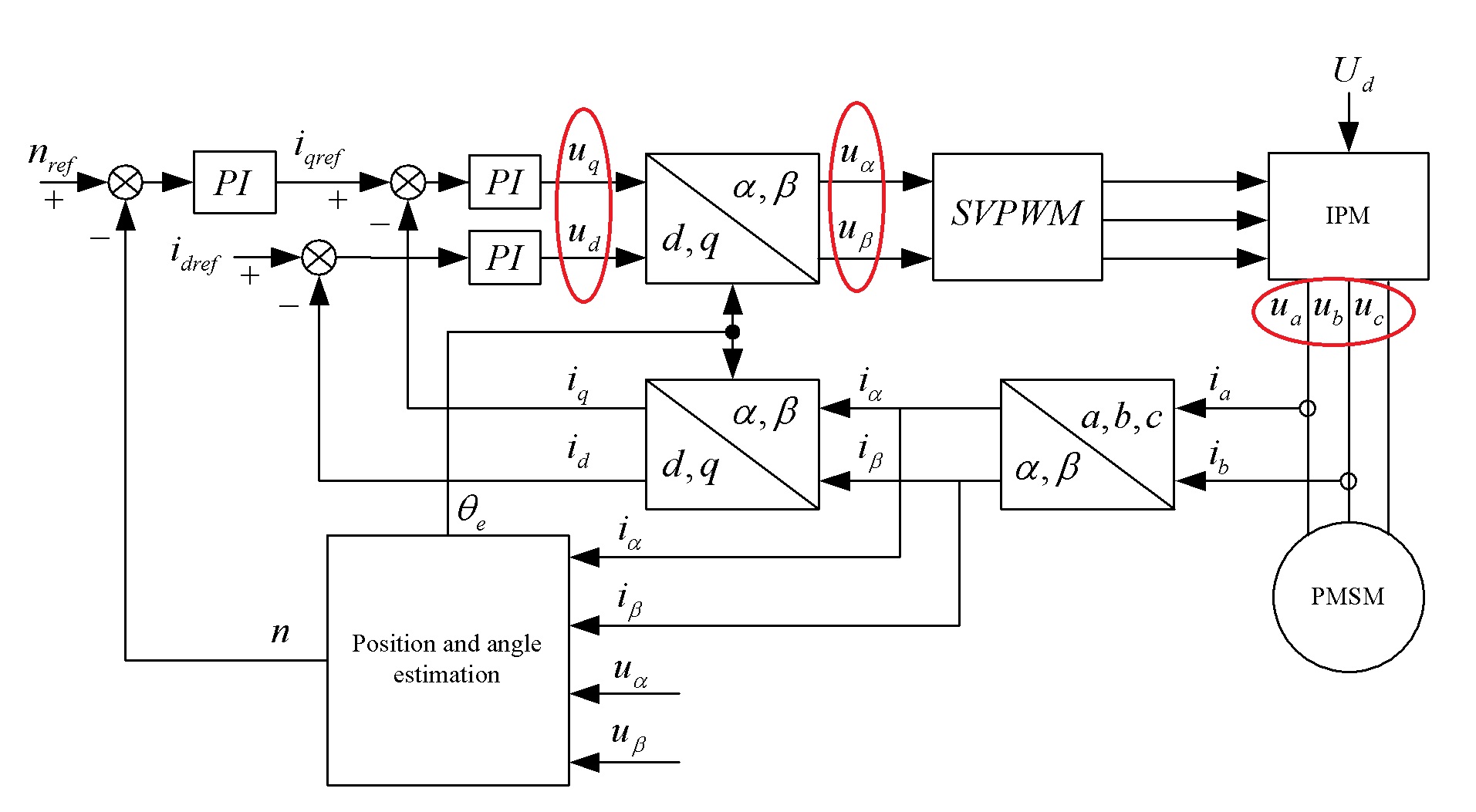
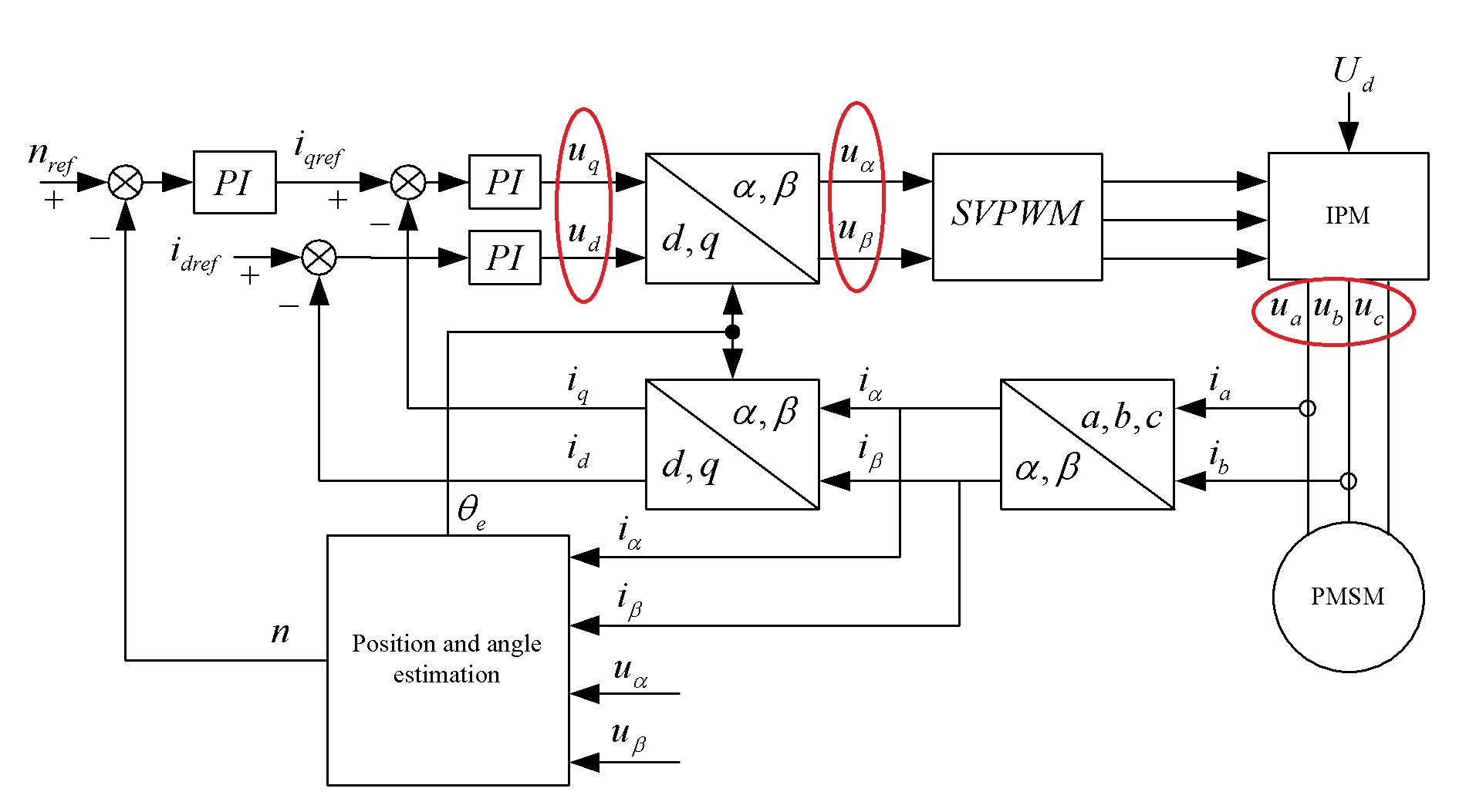
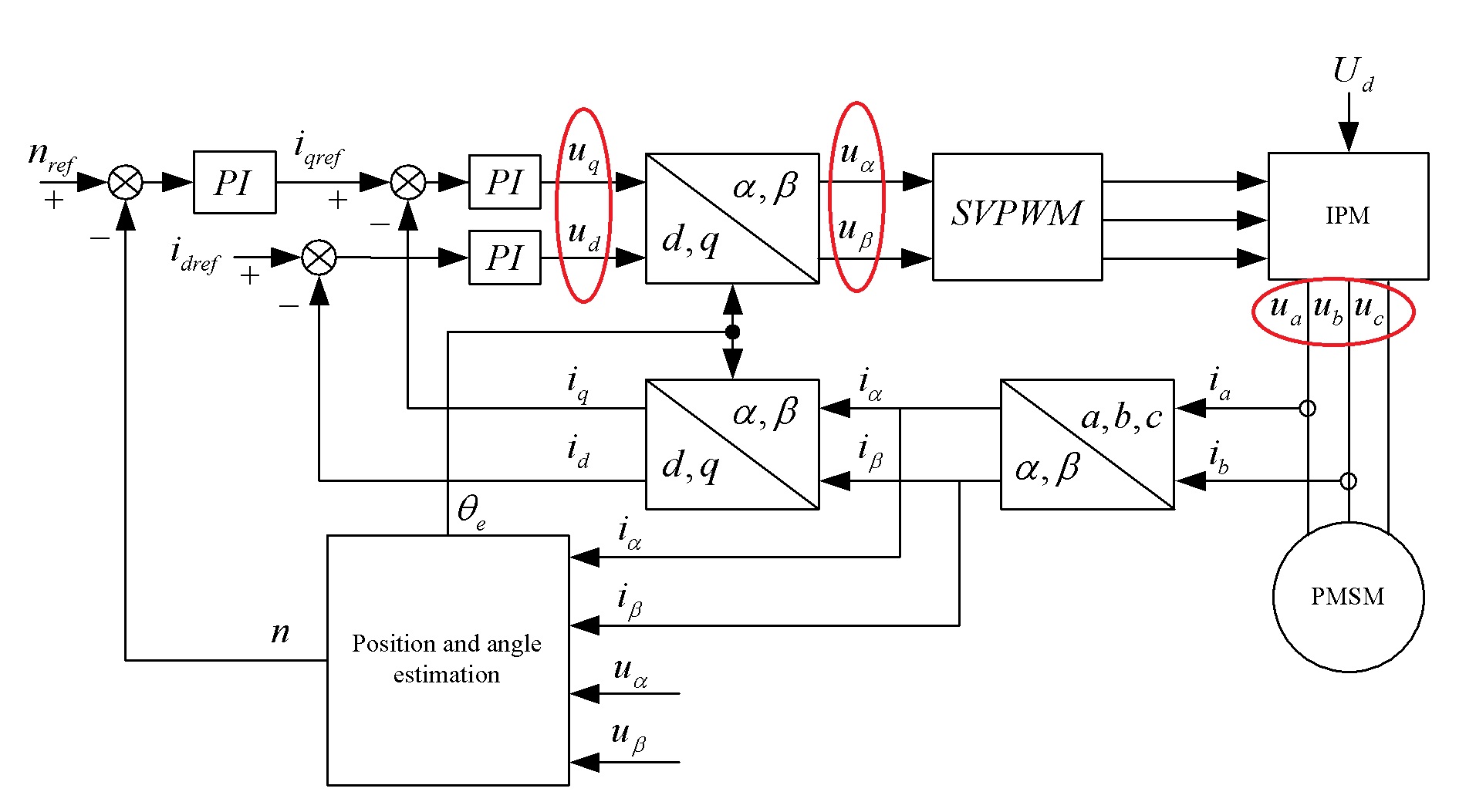
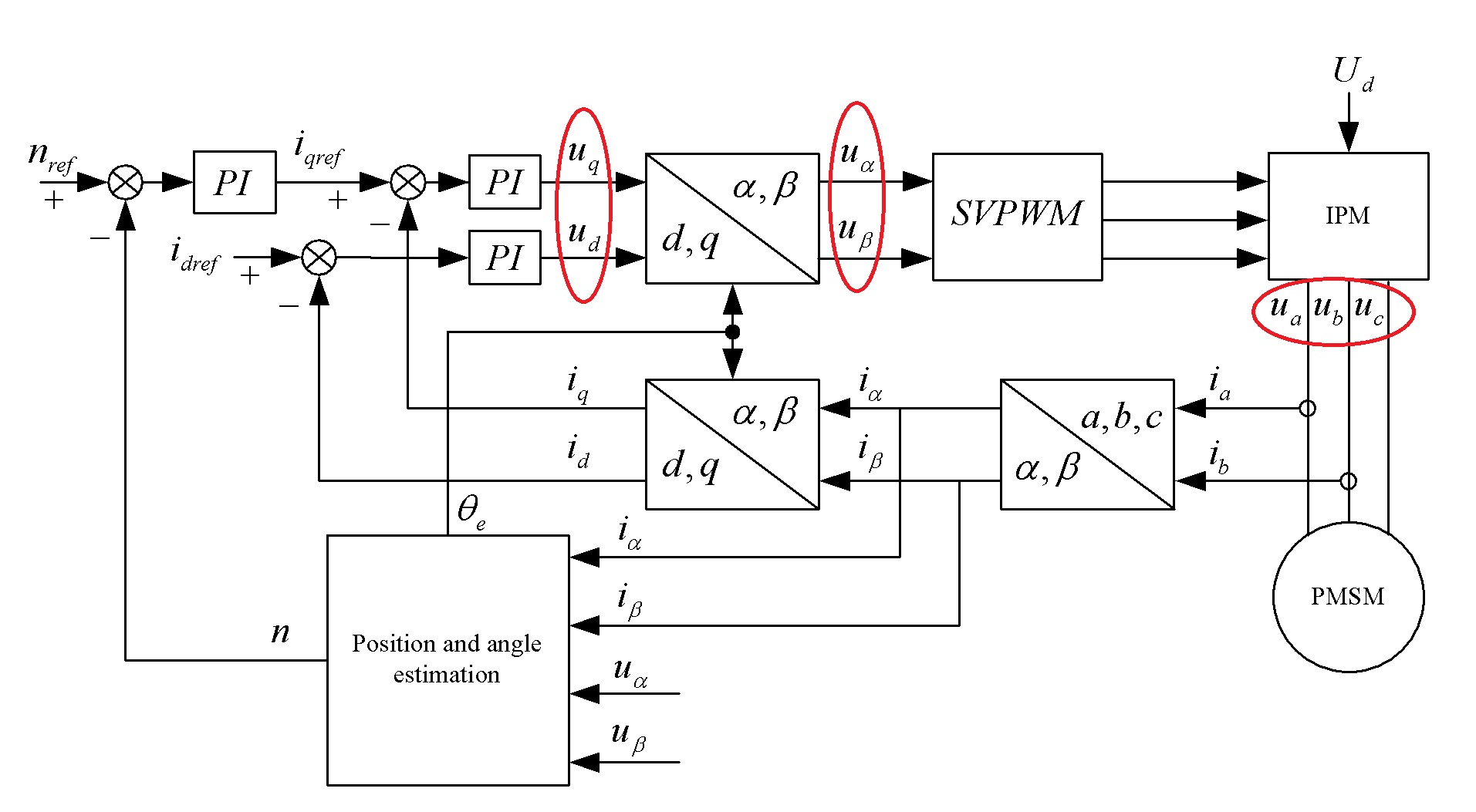
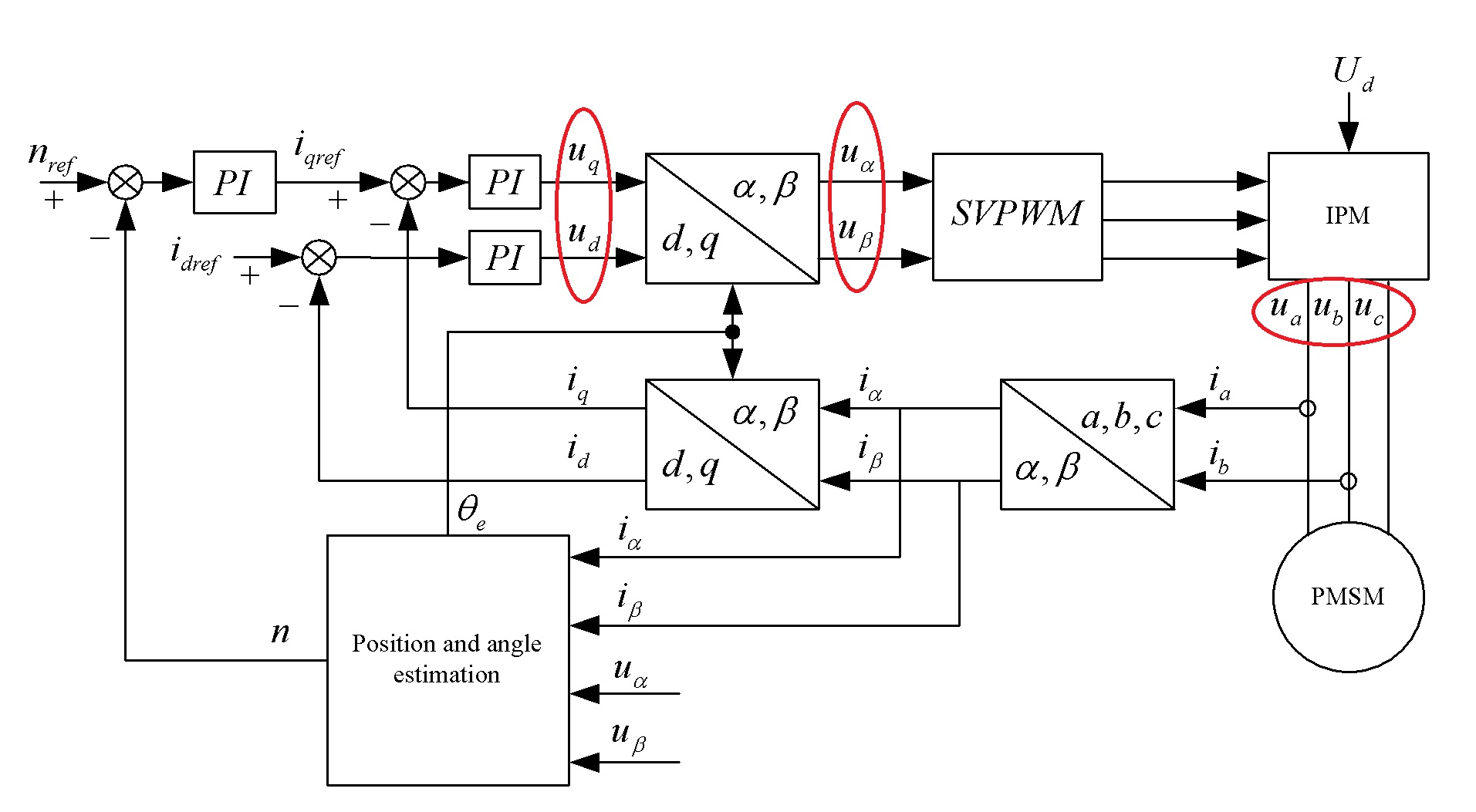
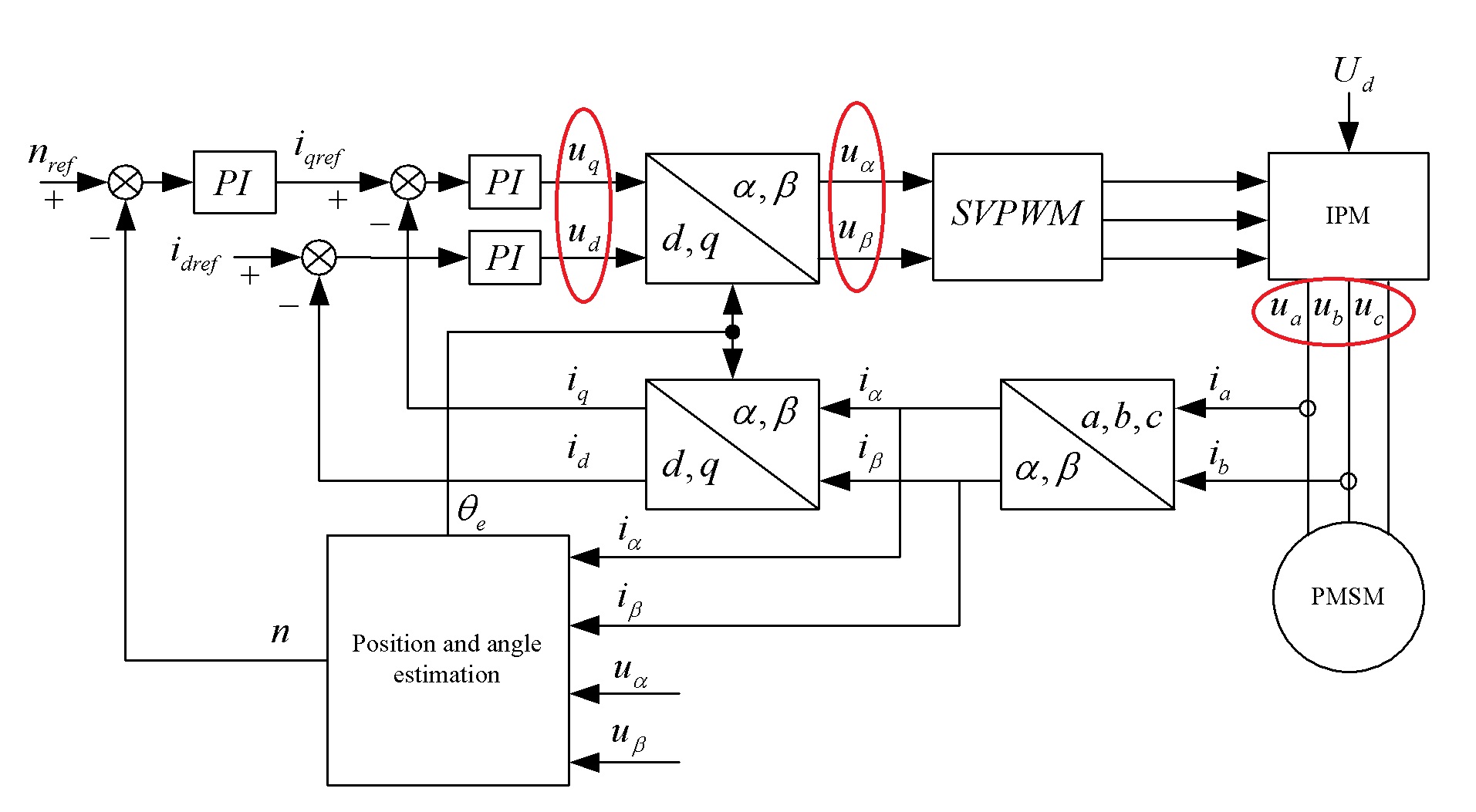
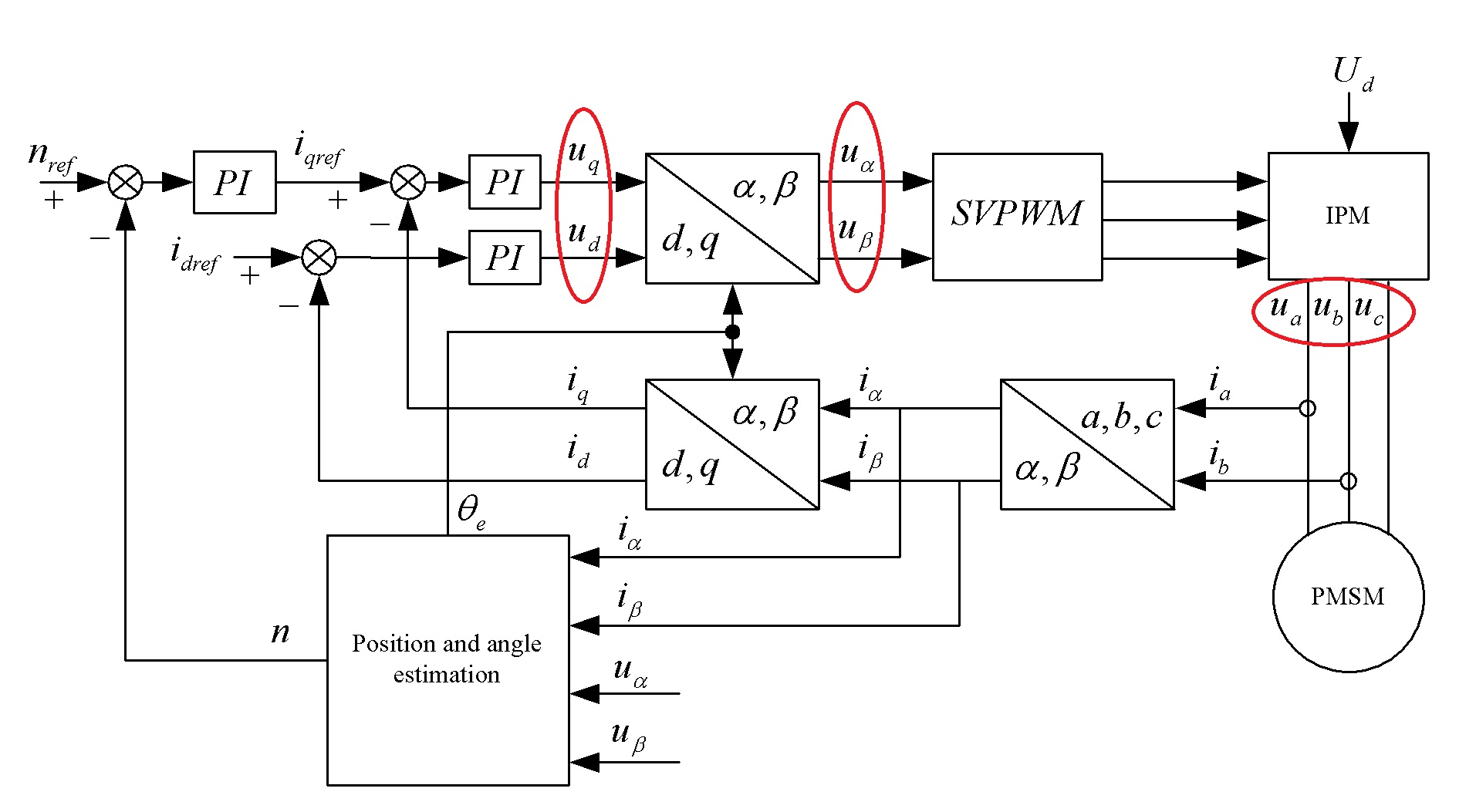
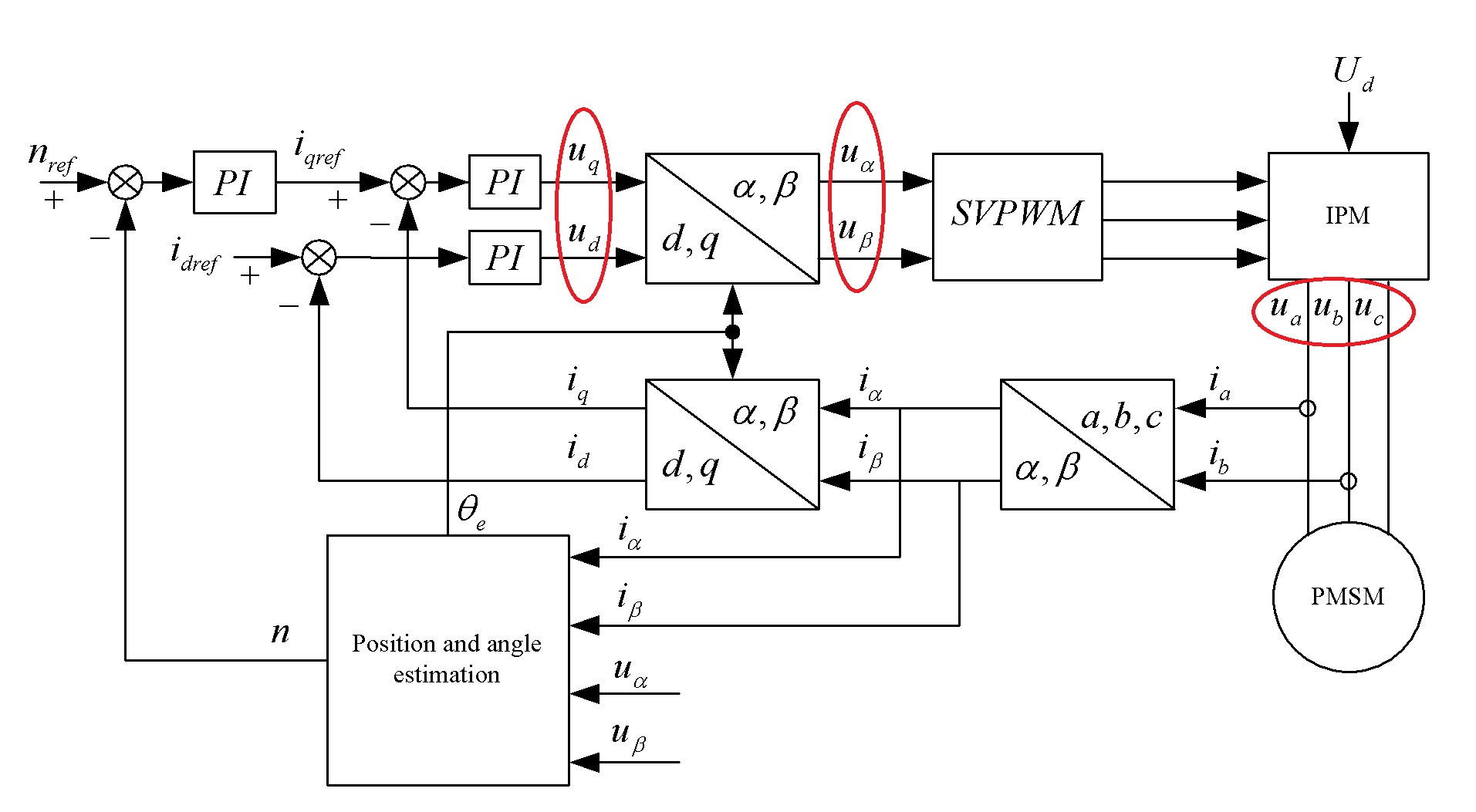
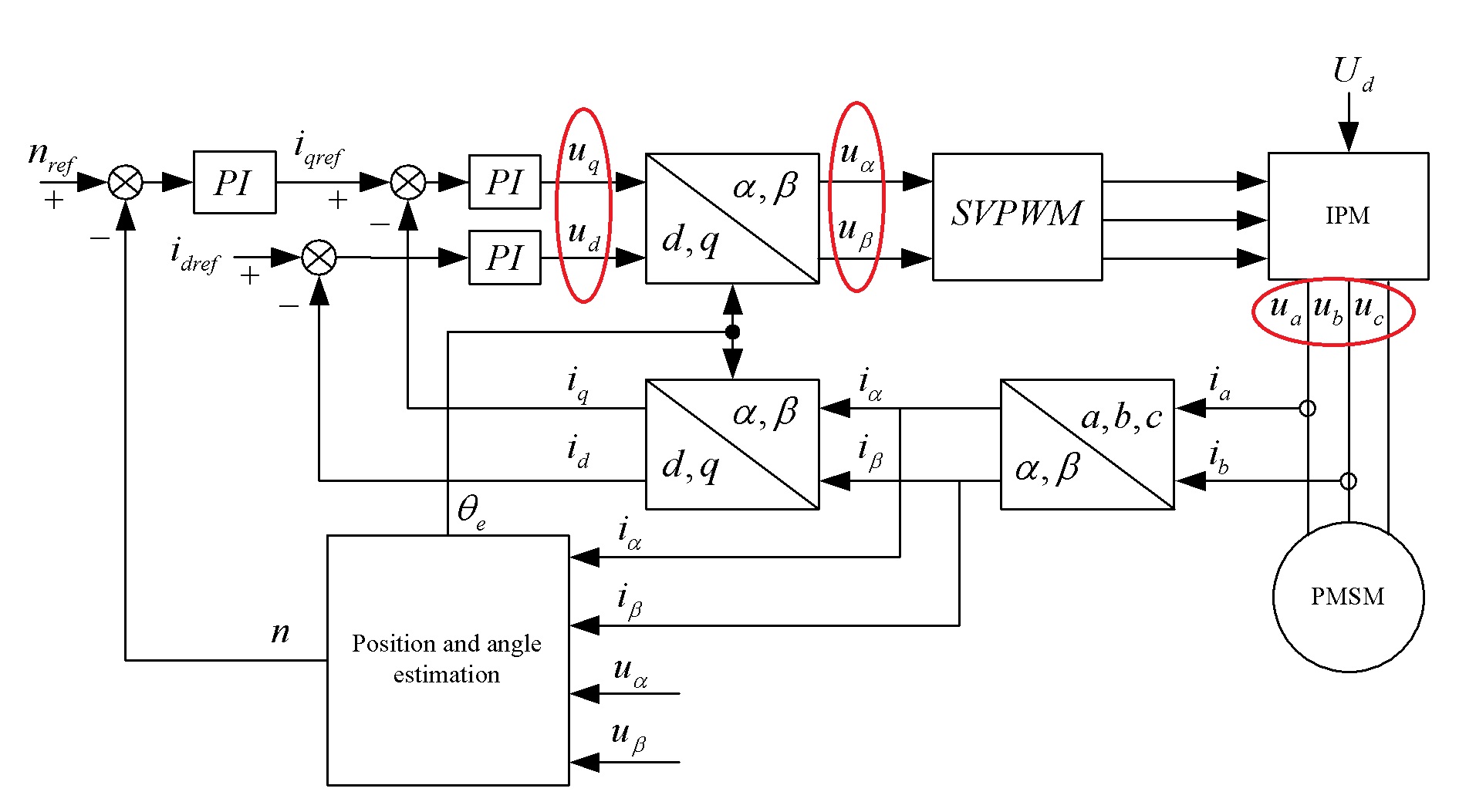
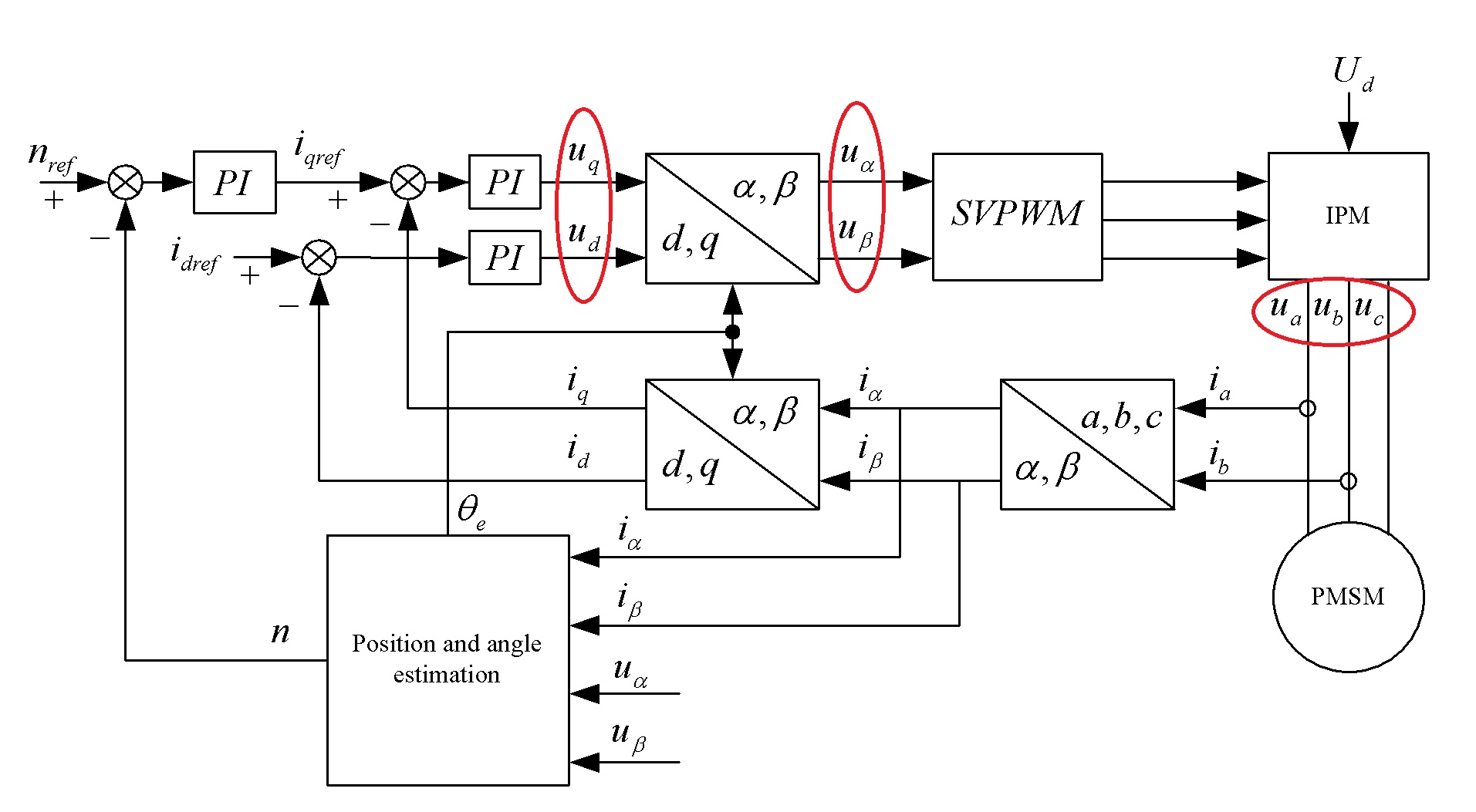
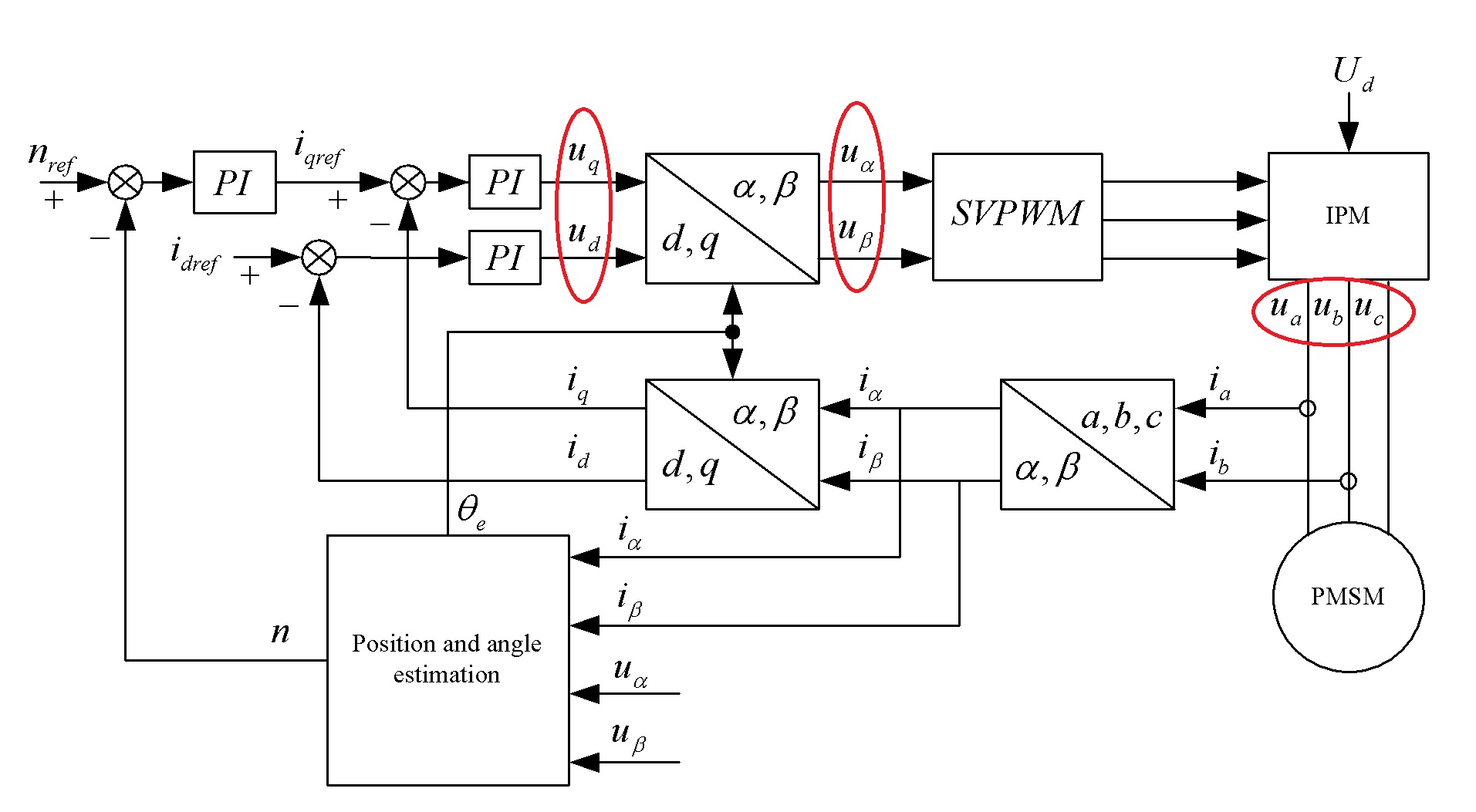
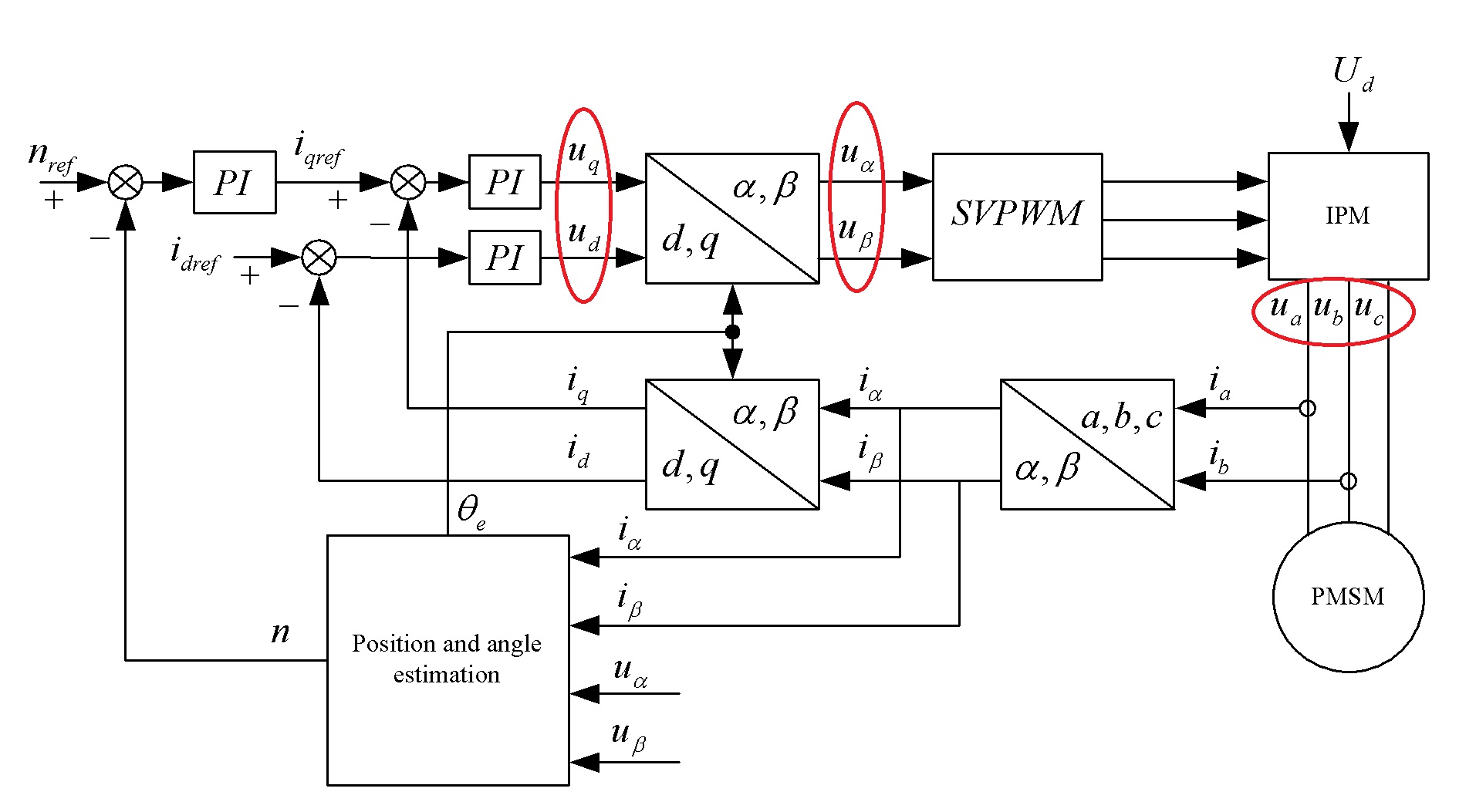
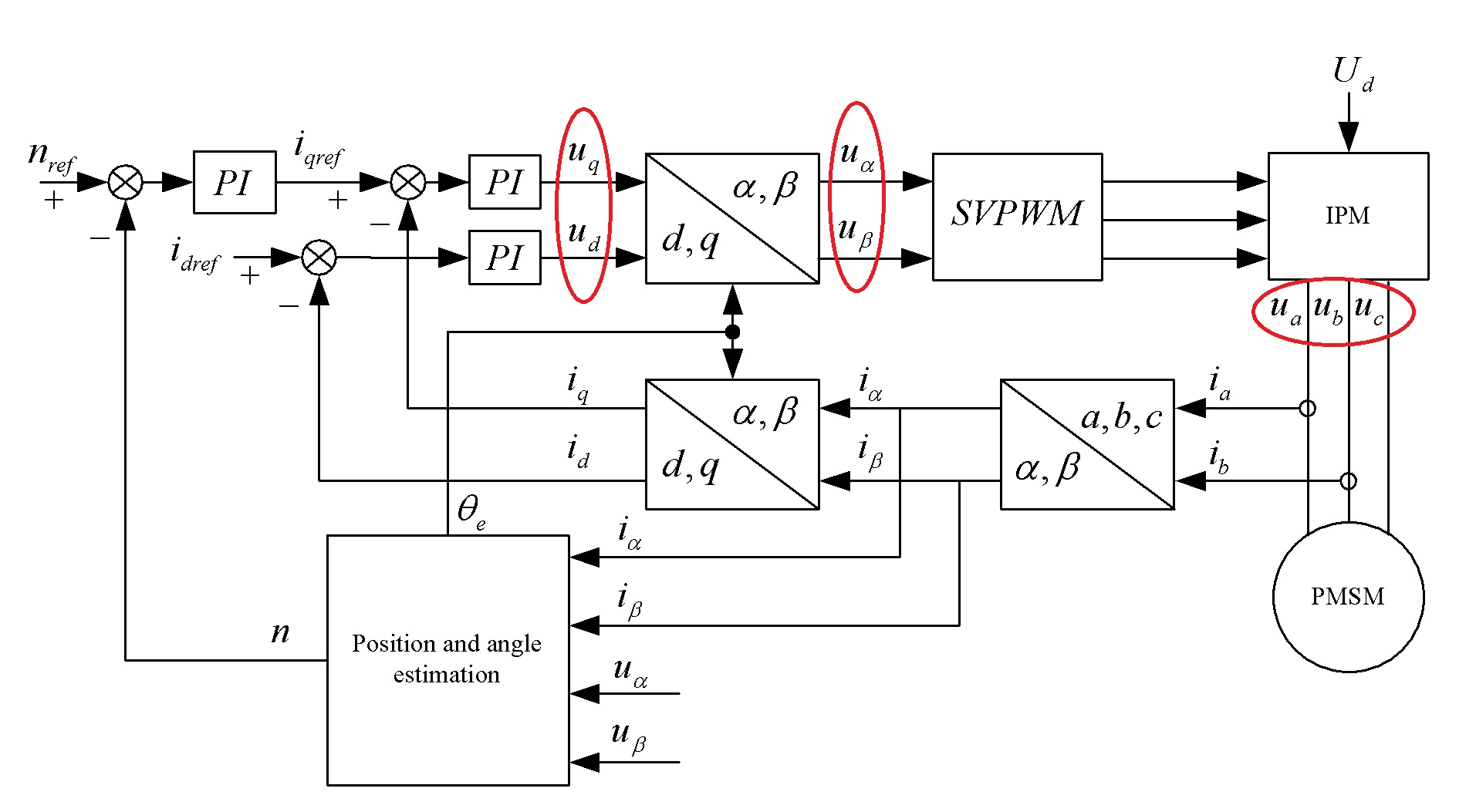
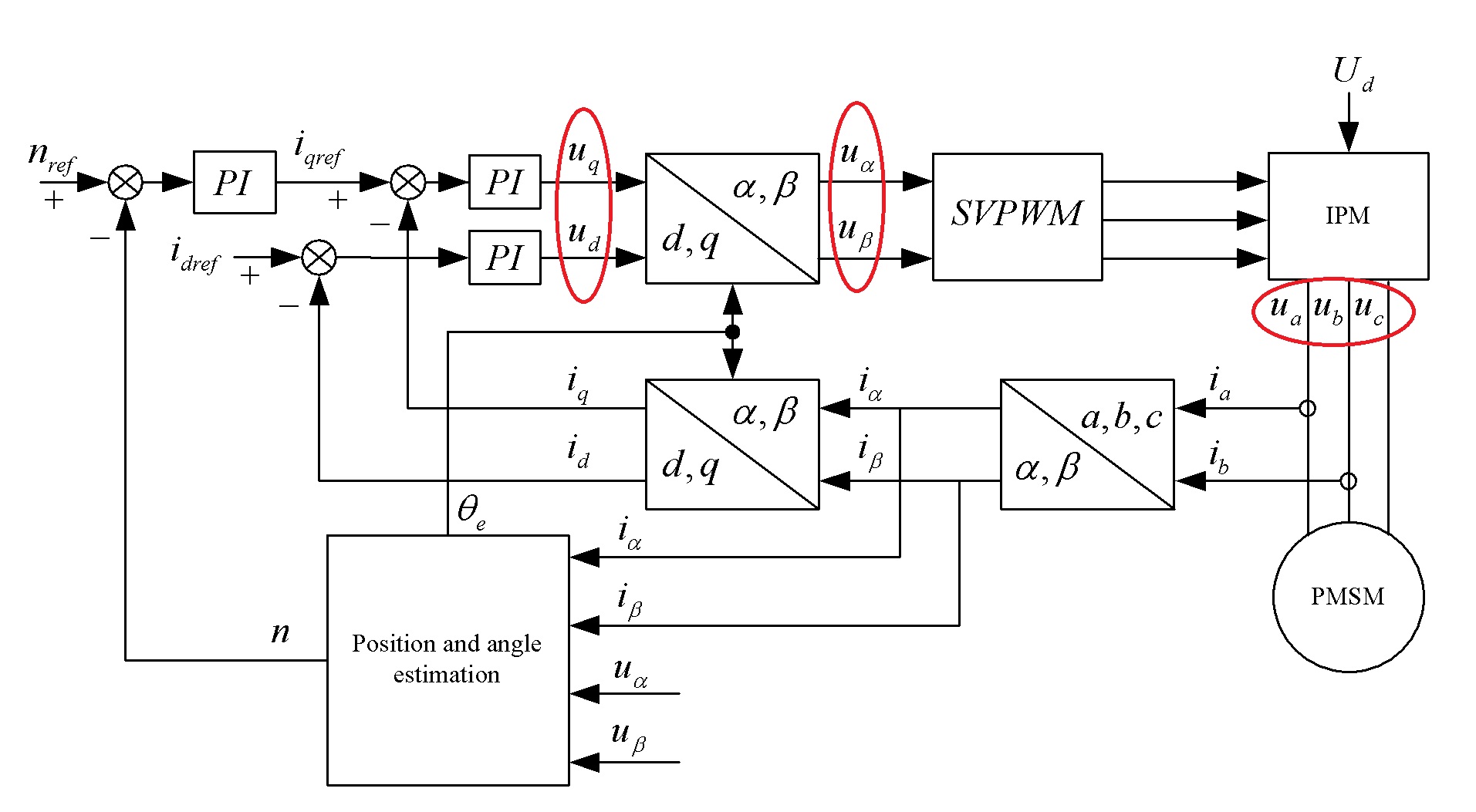
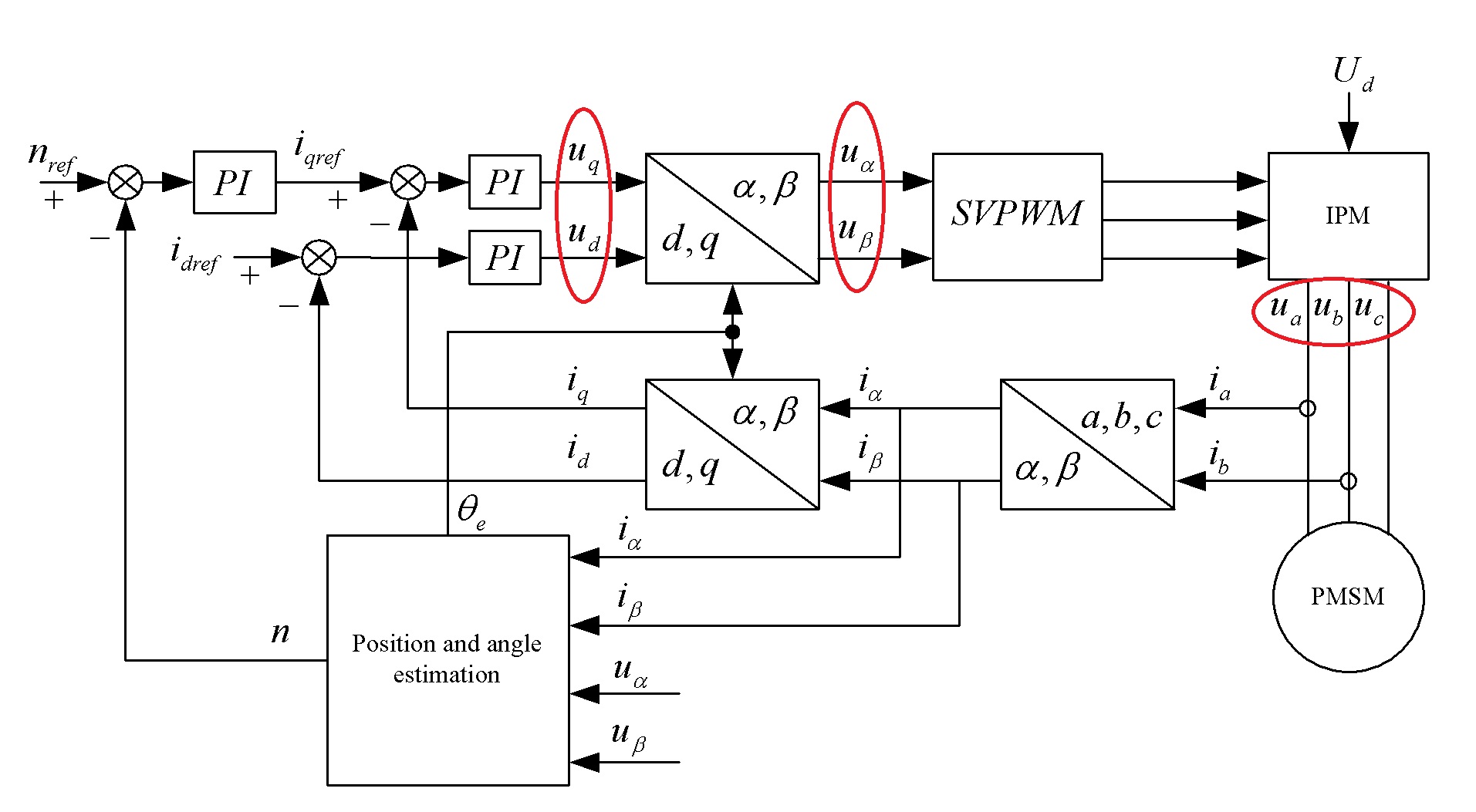
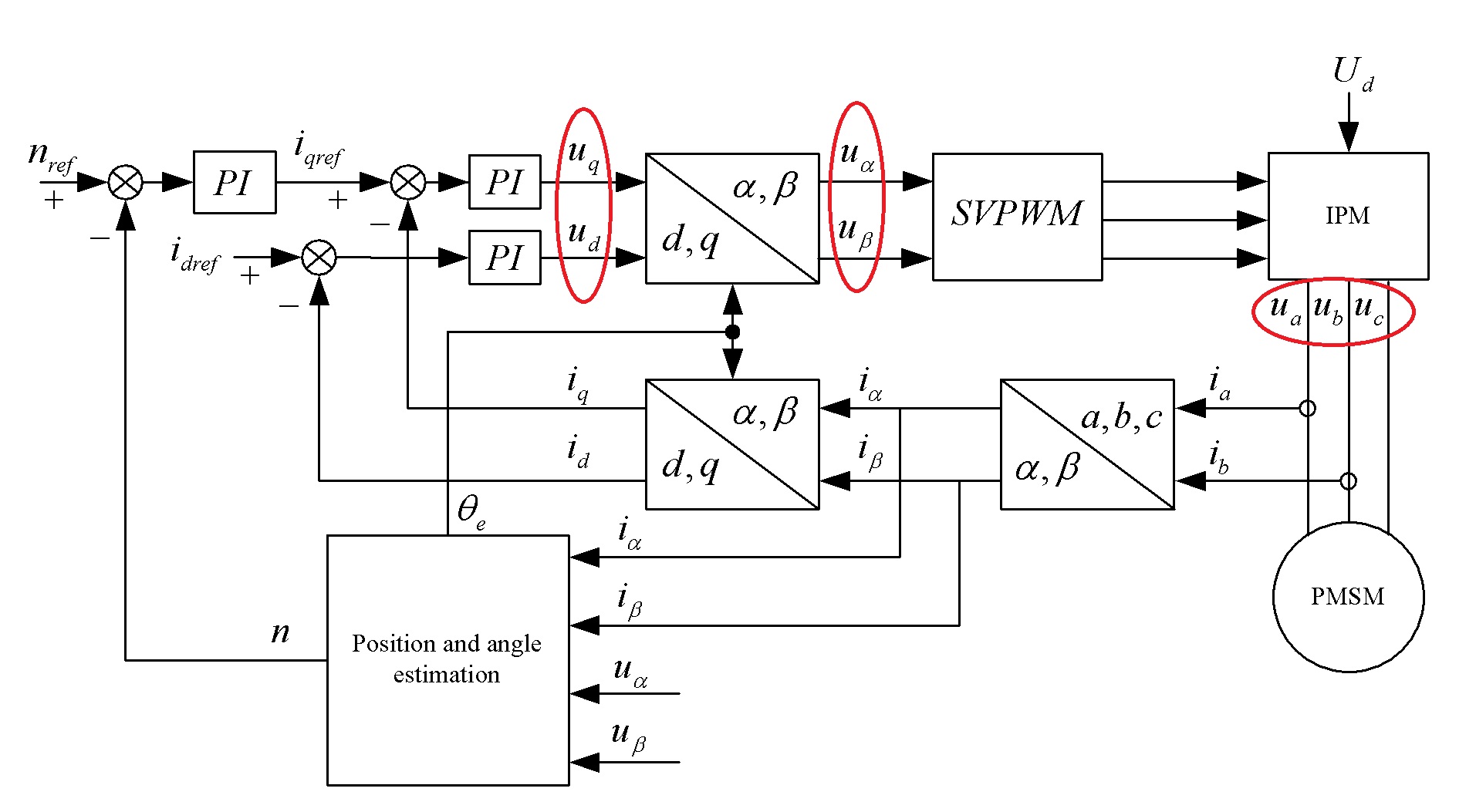
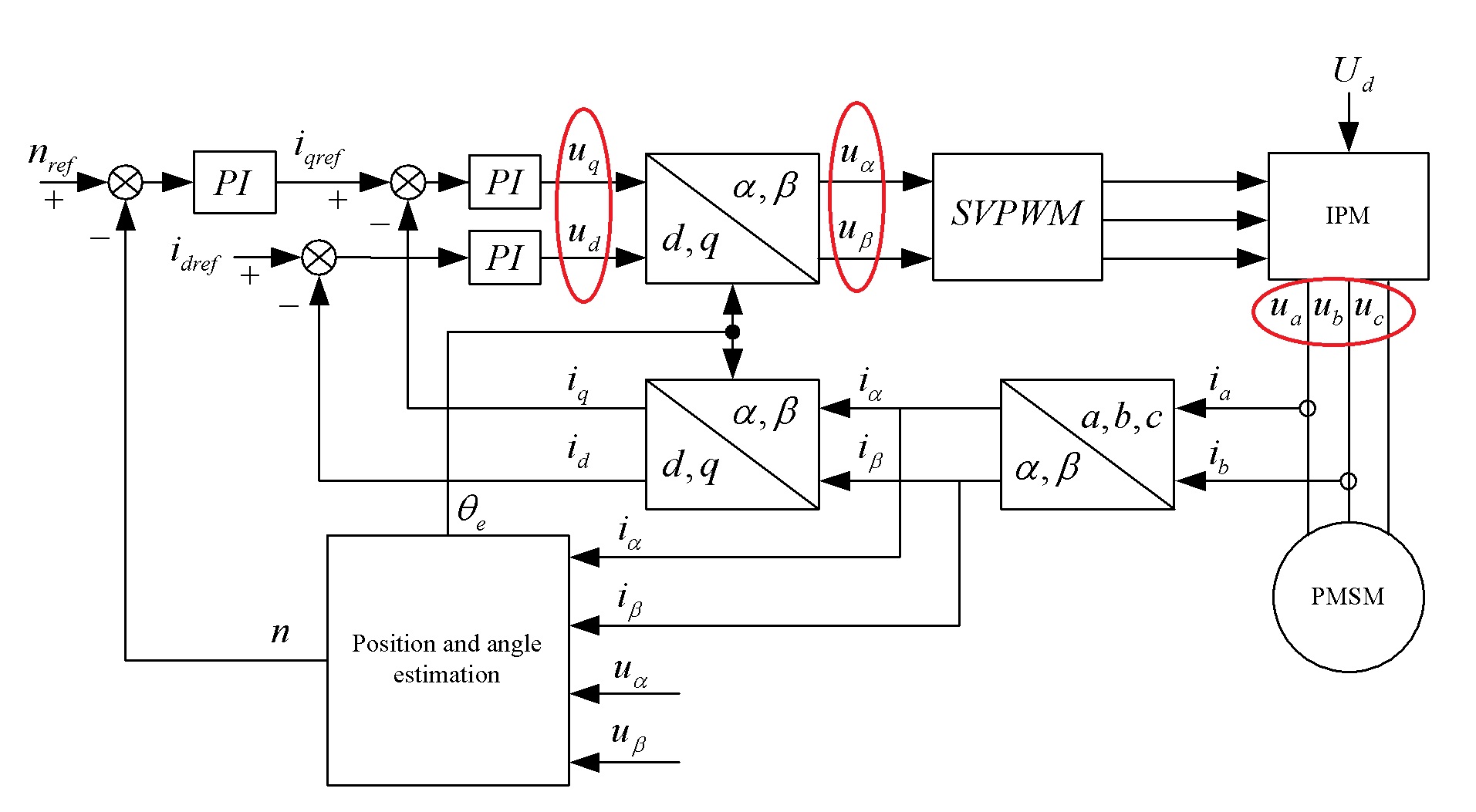
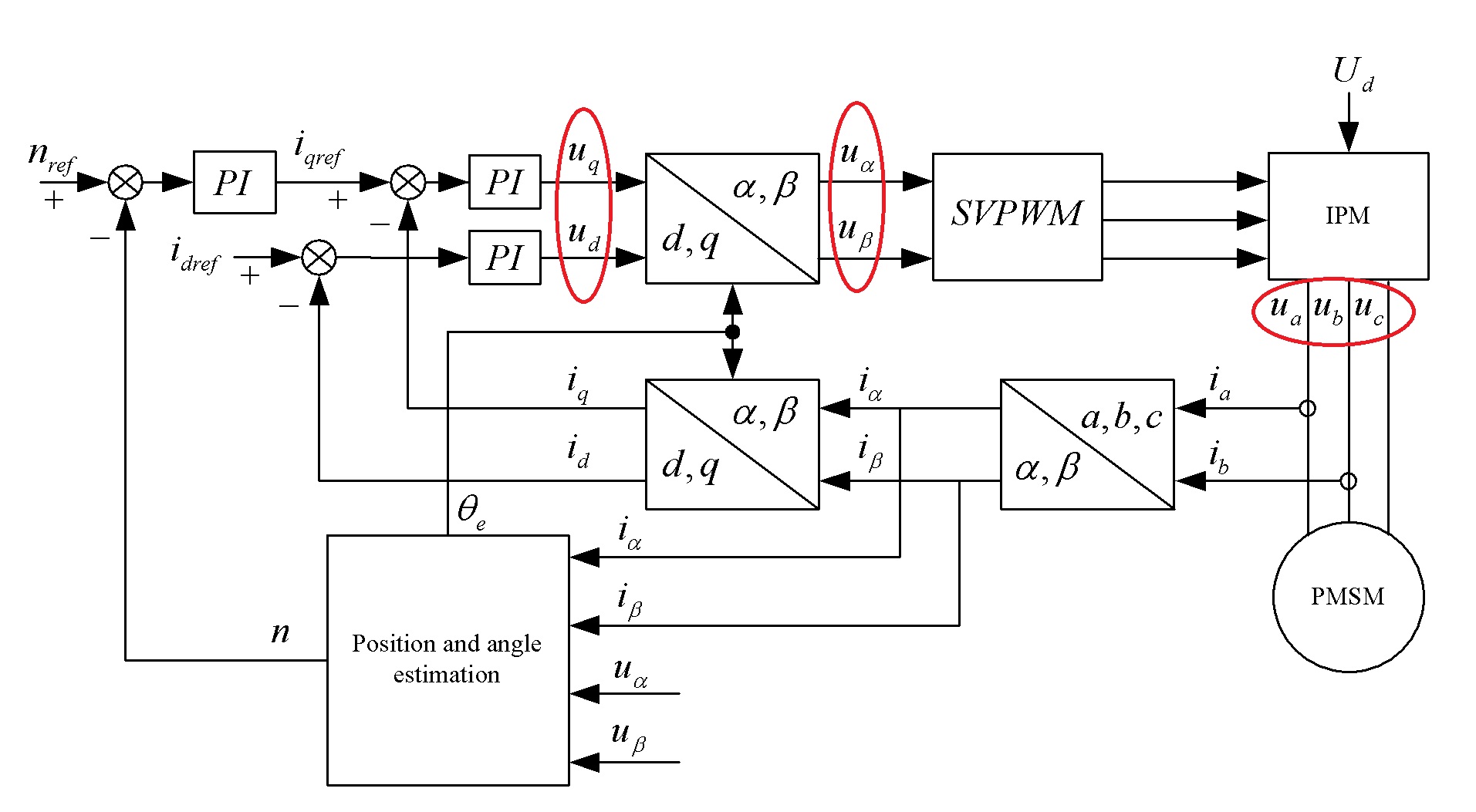
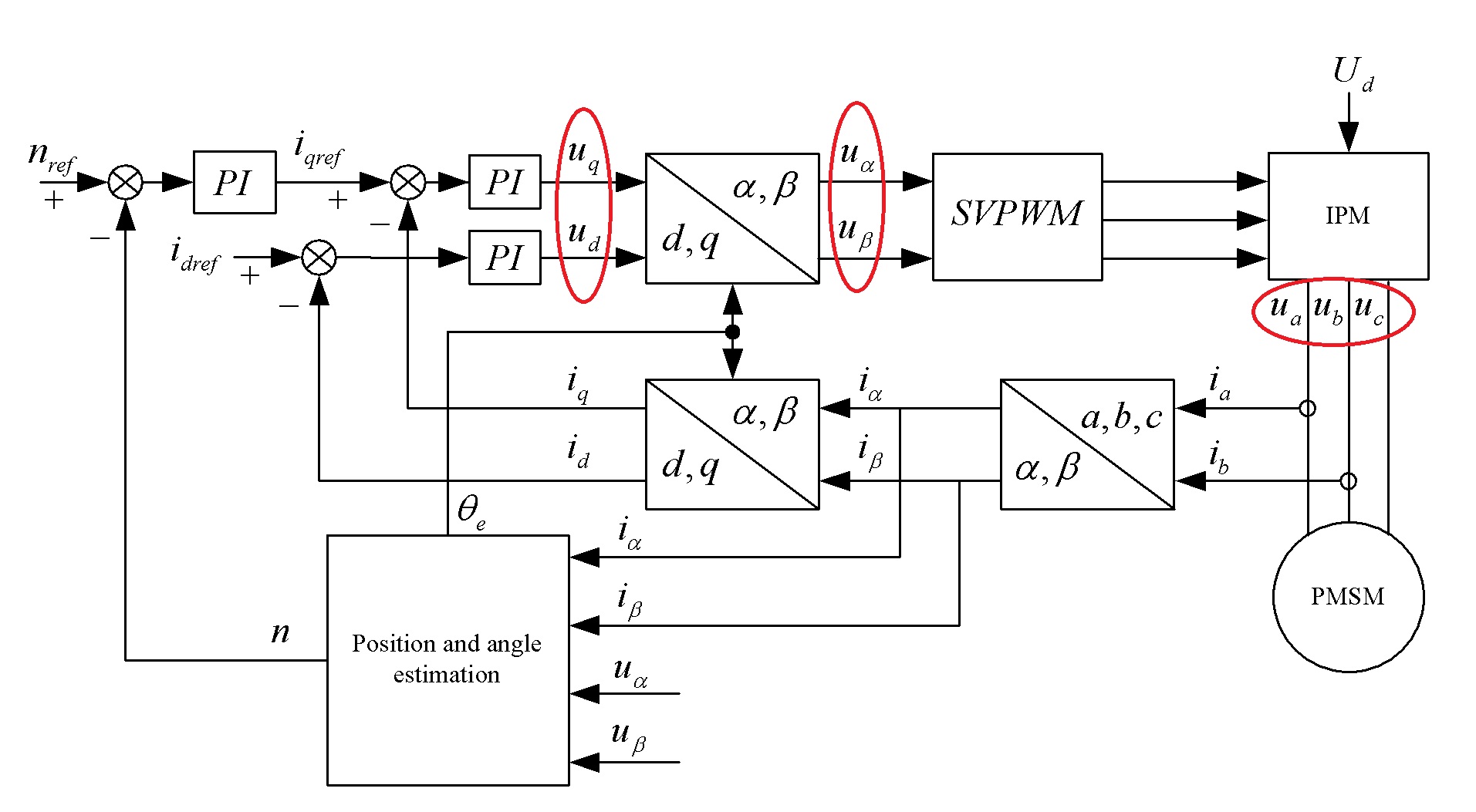
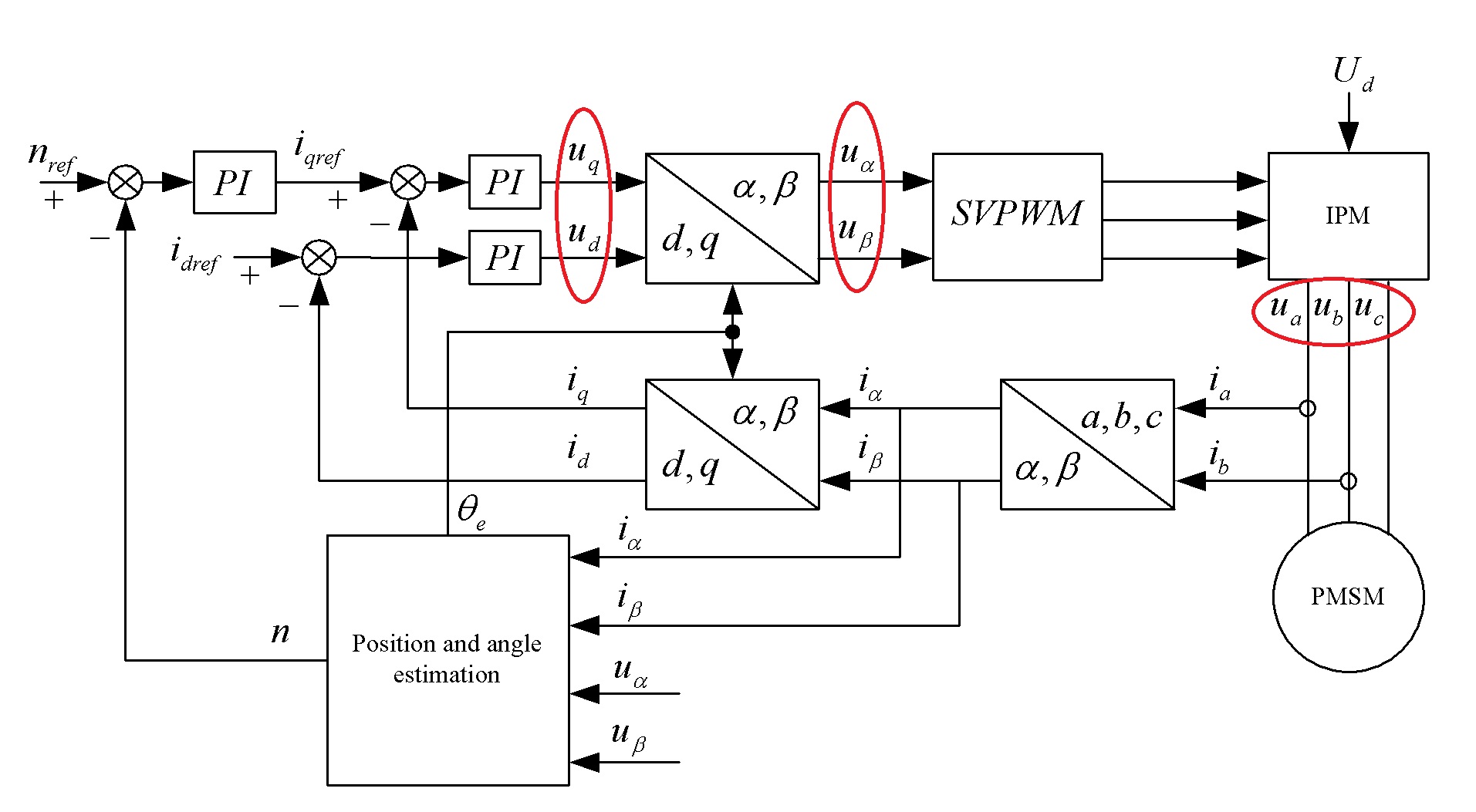
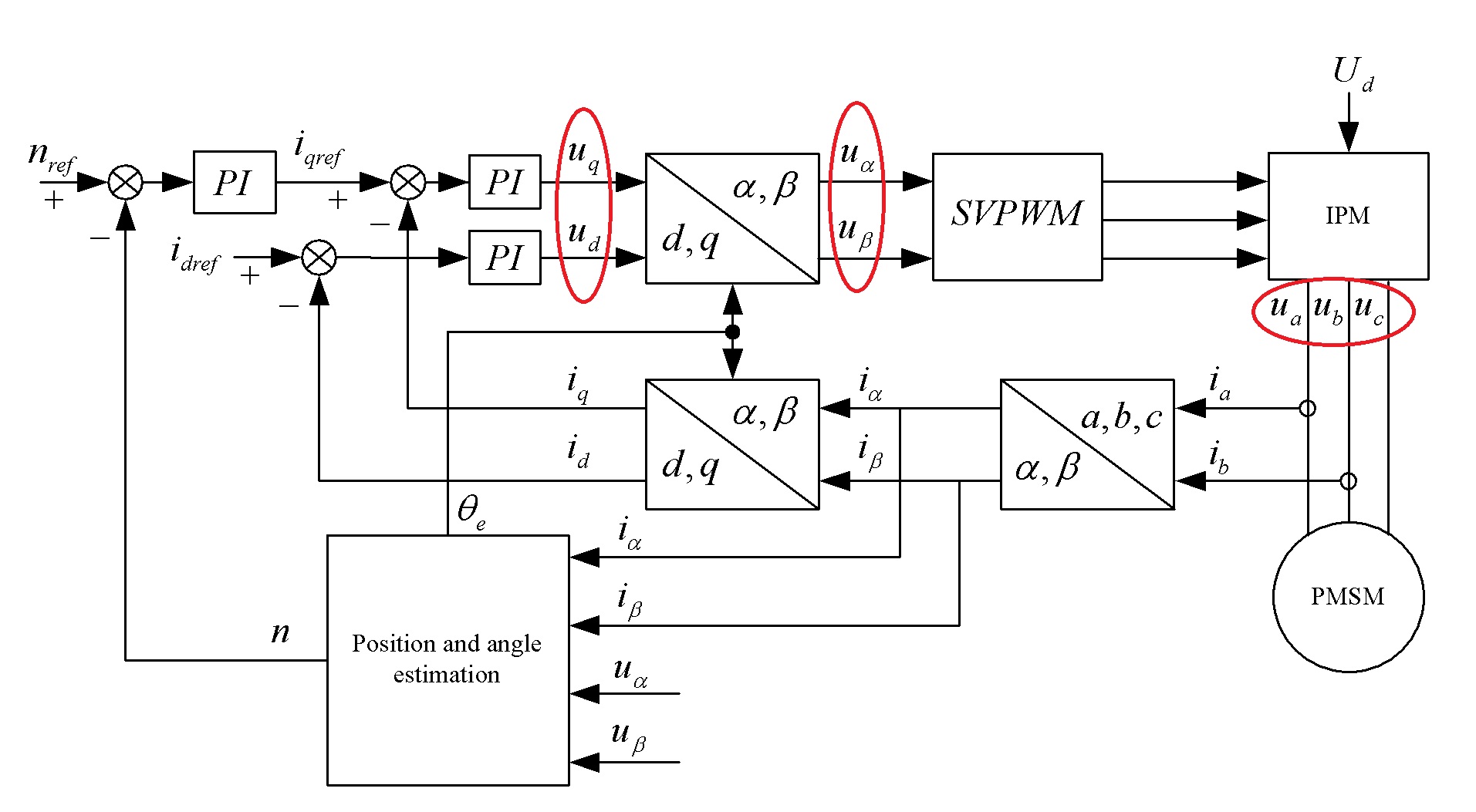
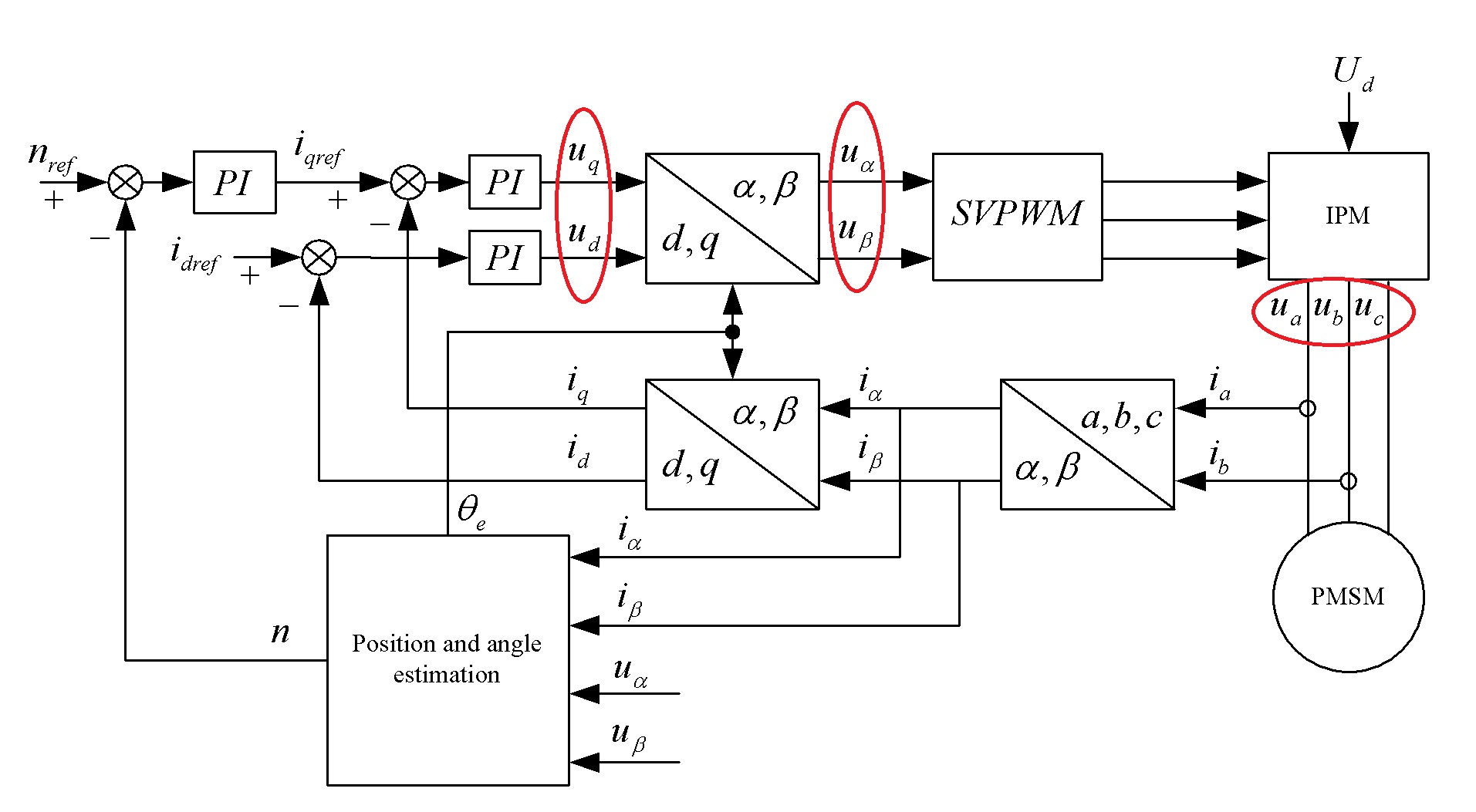
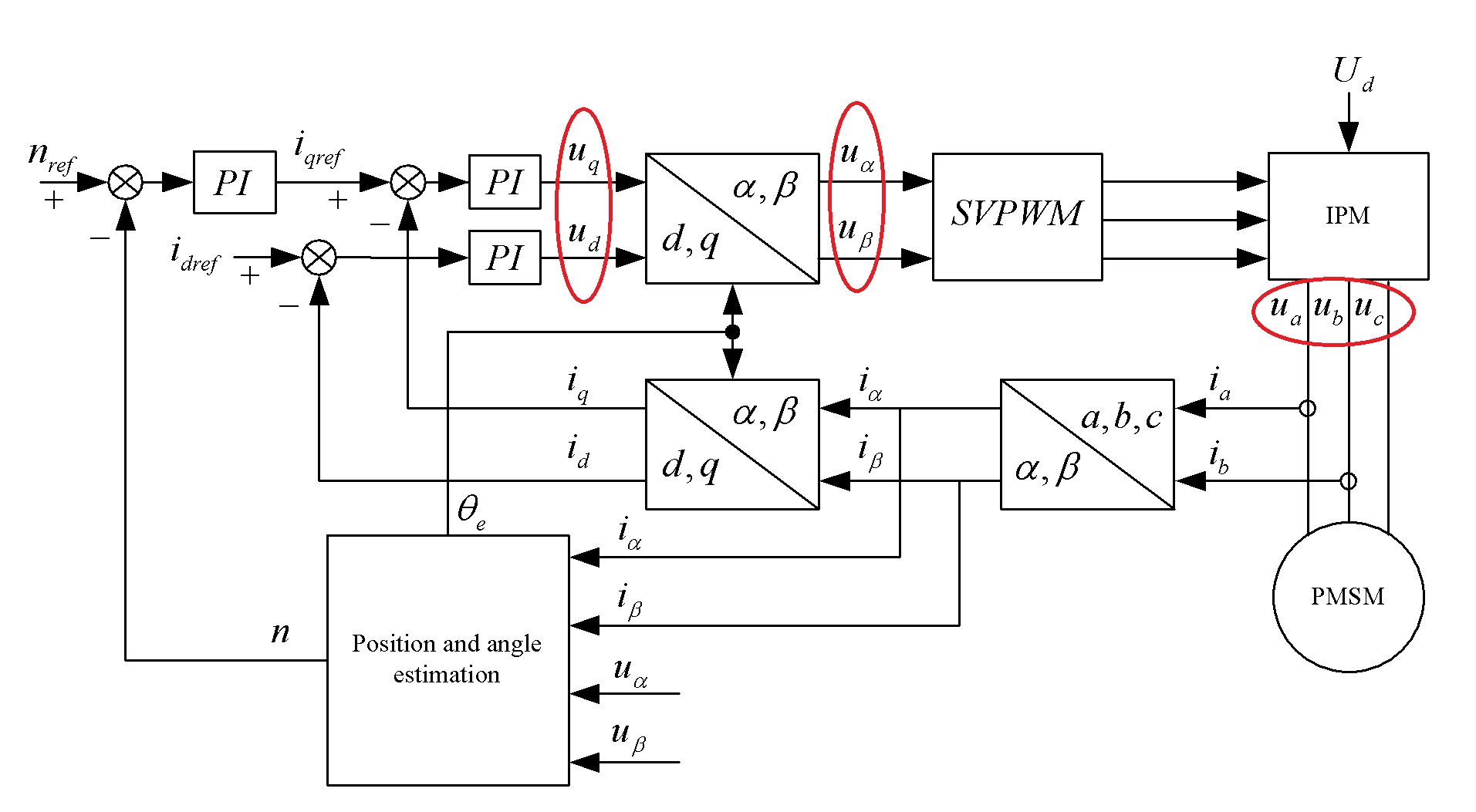
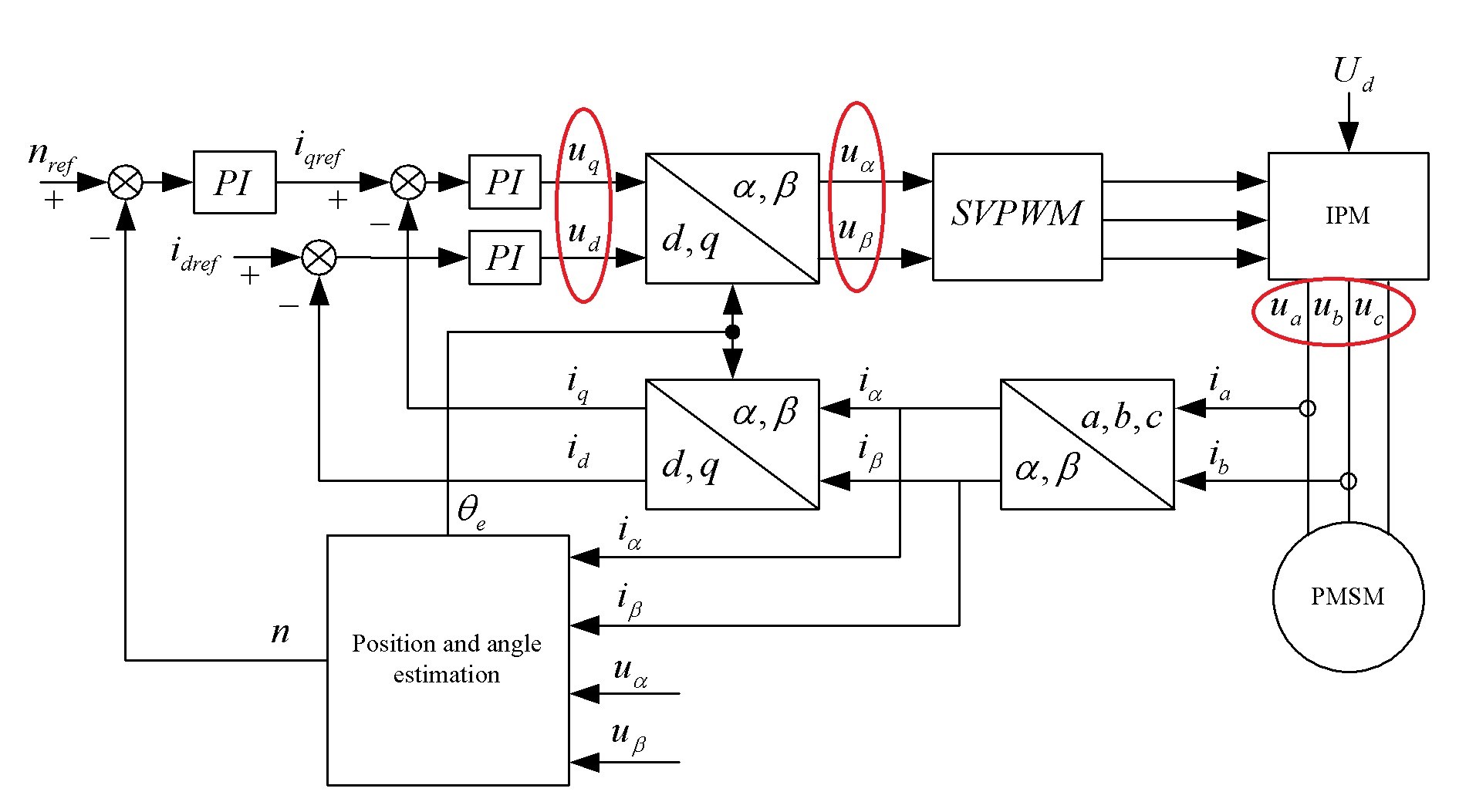
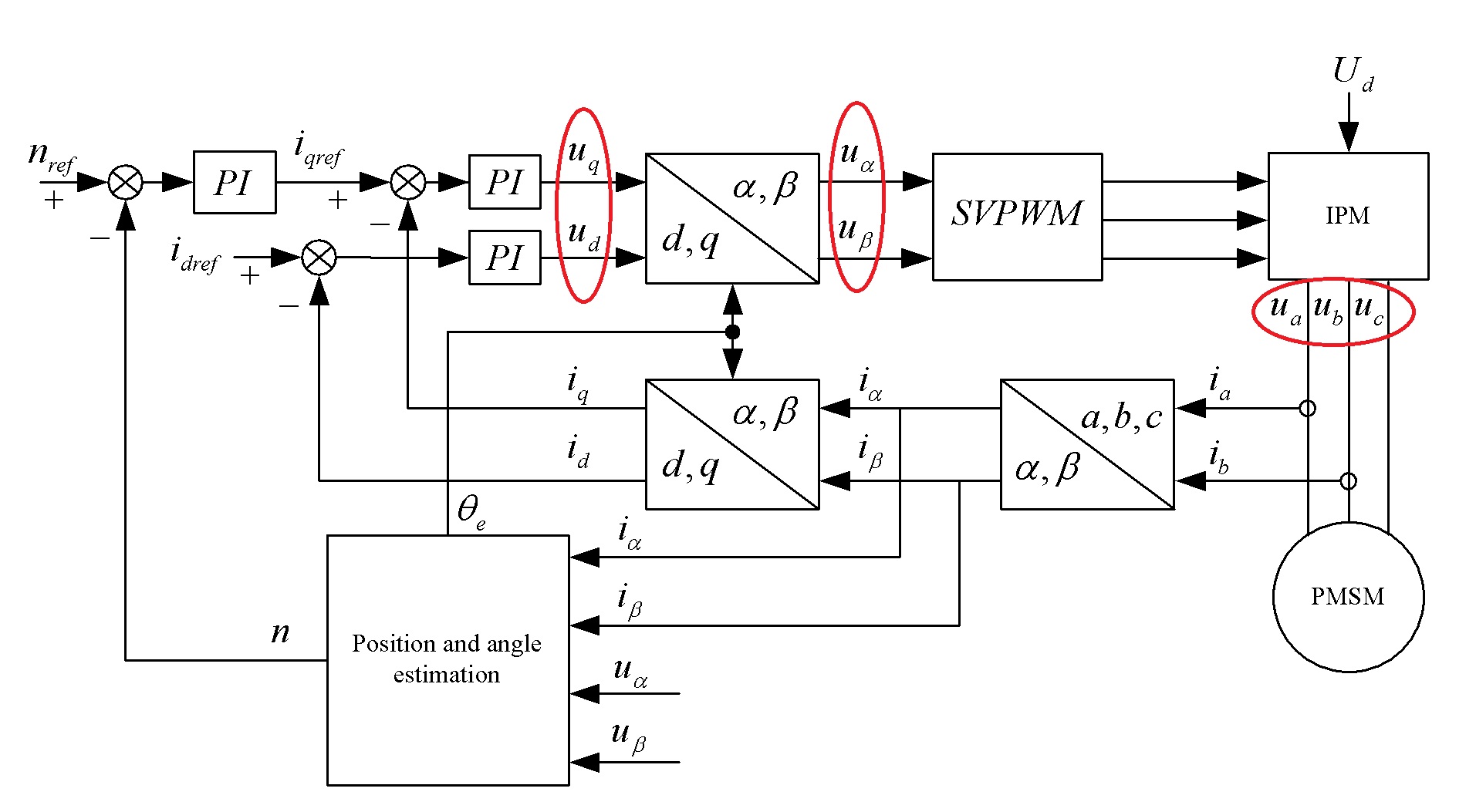
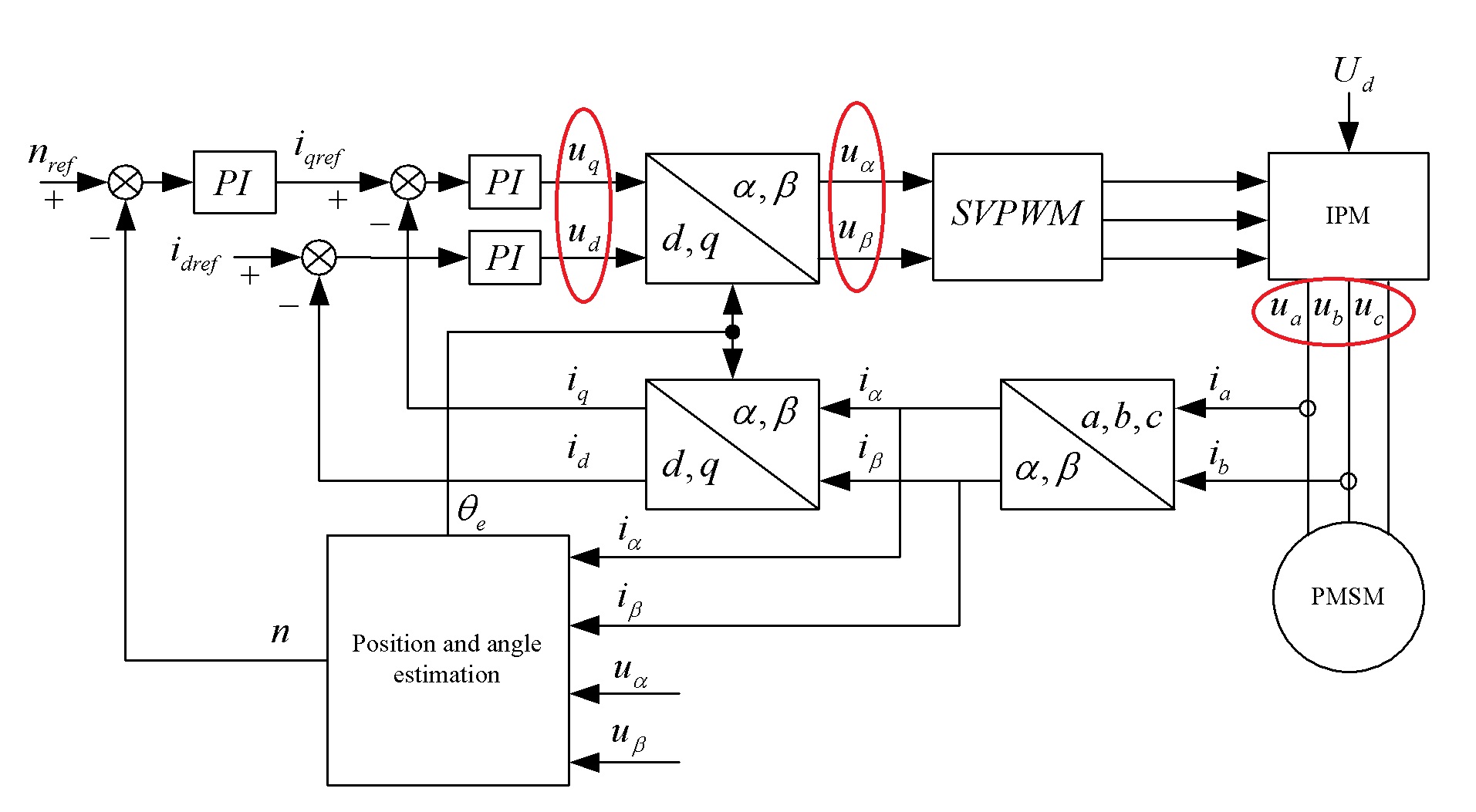
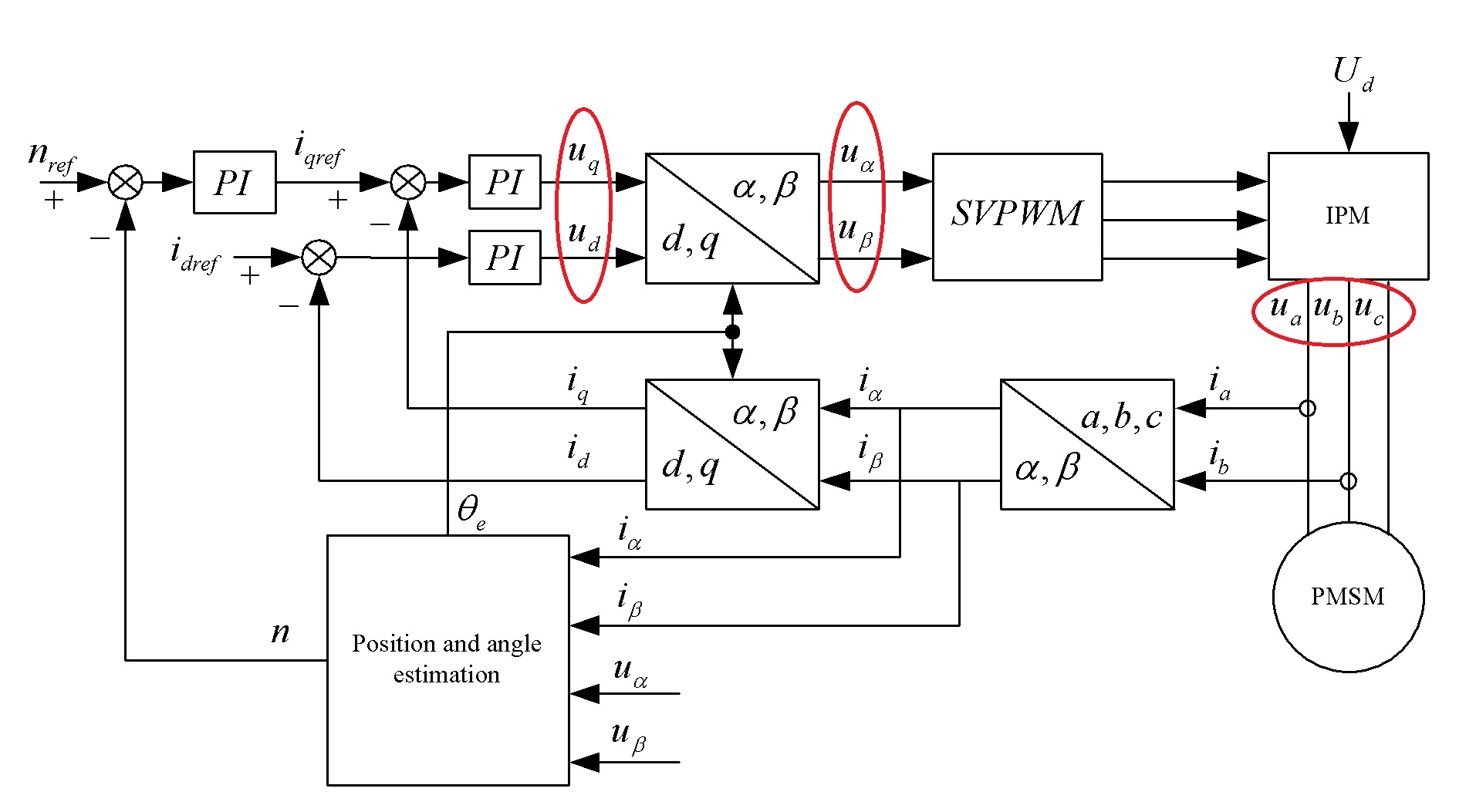
The following figure is the typical and simple sketch for PMSM control, the forward ualpha/ubeta, ud/uq in the red ellipse are used for calculating SVPWM duty.
The three phase voltage ua,ub,uc of motor are sampled. Through Clarke and park transform, the backward ualpha/ubeta, ud/uq are generated.
1, What are the differences between the forward ones and backward ones?
2, Are their amplitude the same ?
3, If using sliding model observer to control motor, which ualpha/ubeta can be used for the observer, the forward one or the backward one?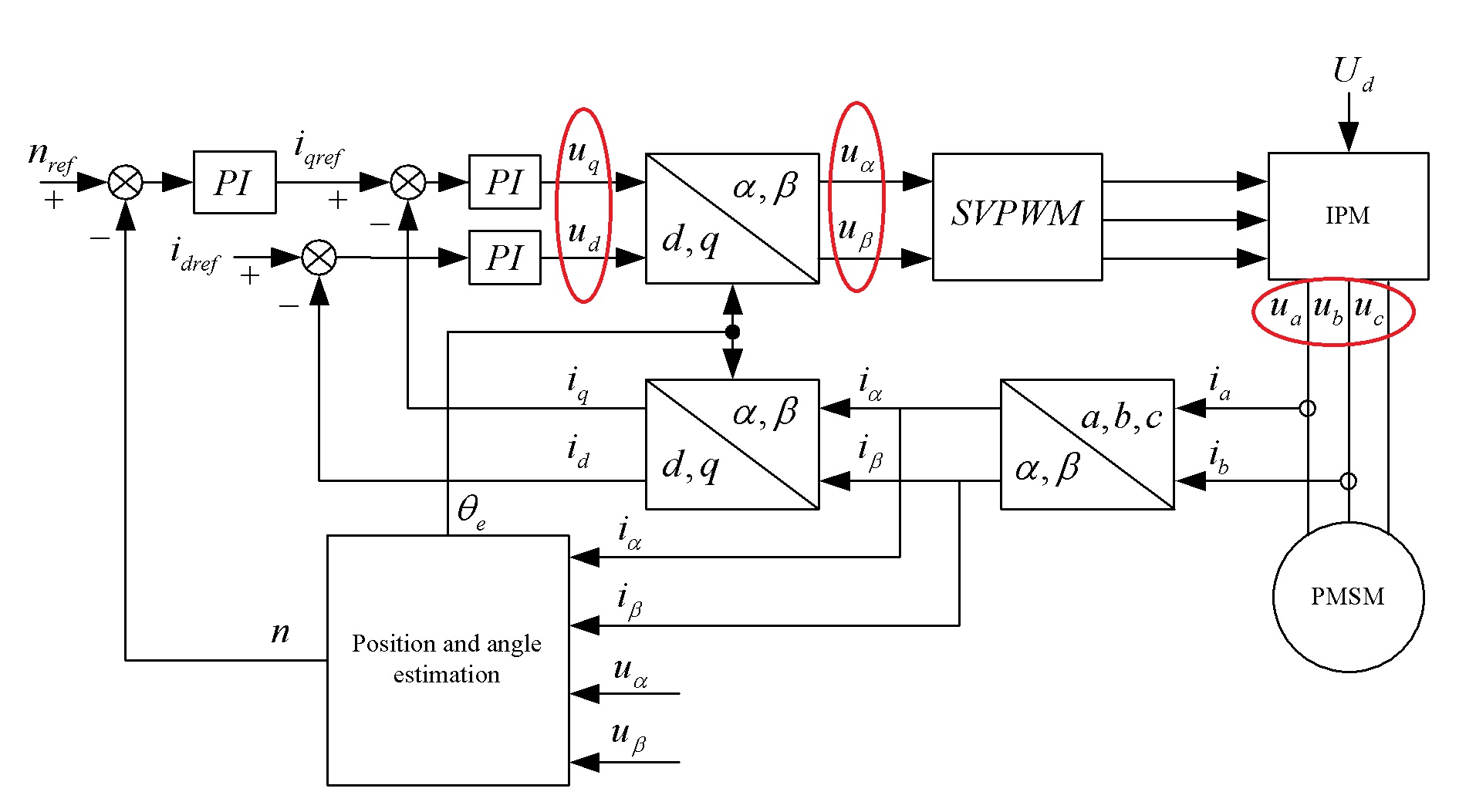


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}