


Other Parts Discussed in Thread: MOTORWARE
hello,
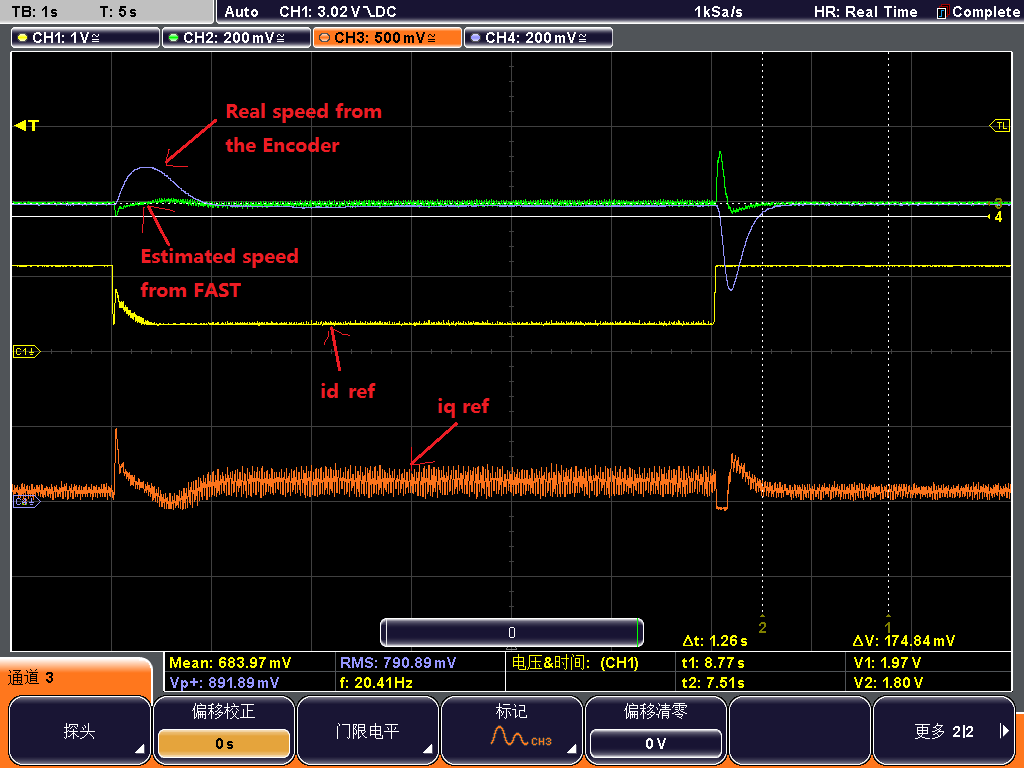
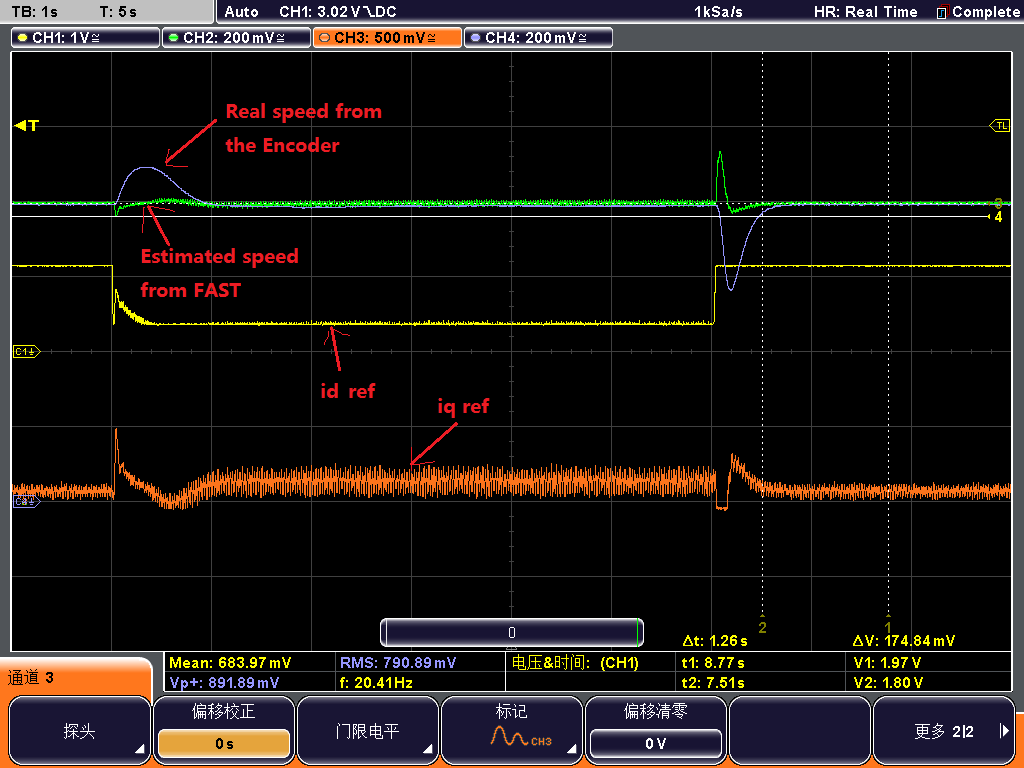
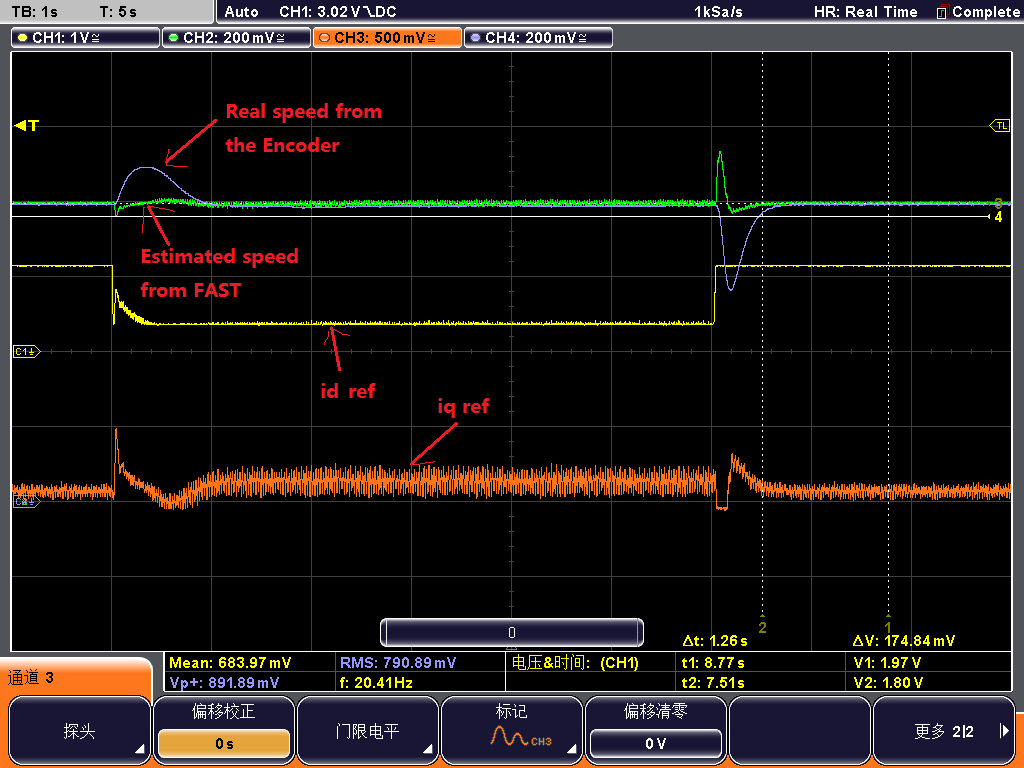
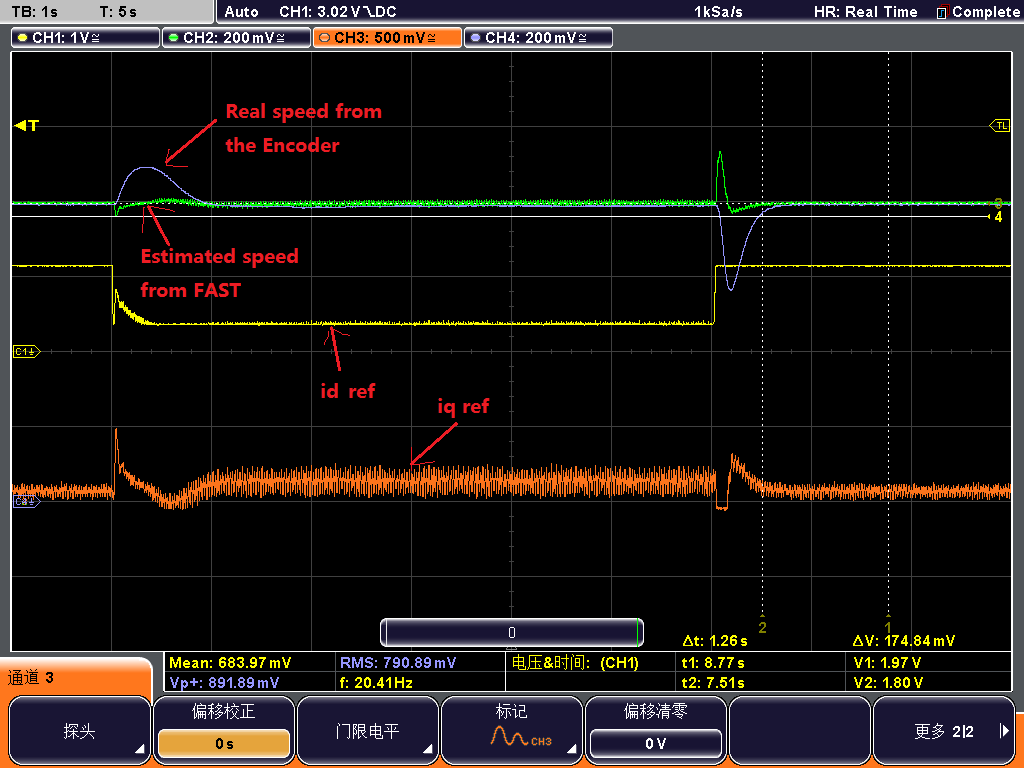
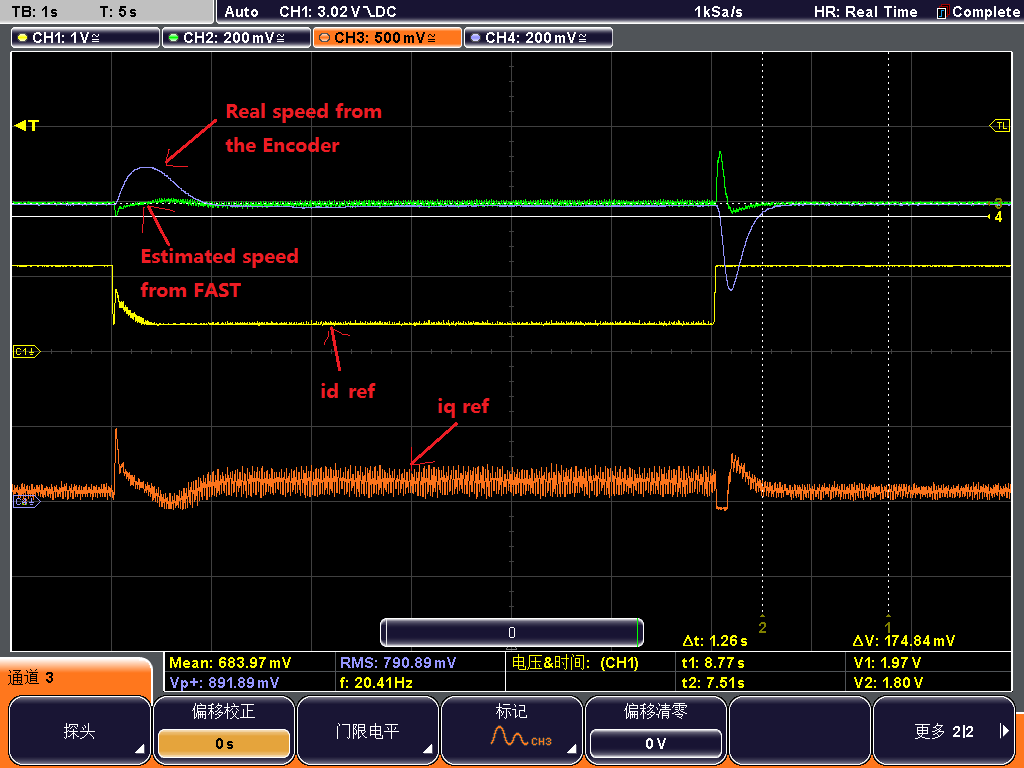
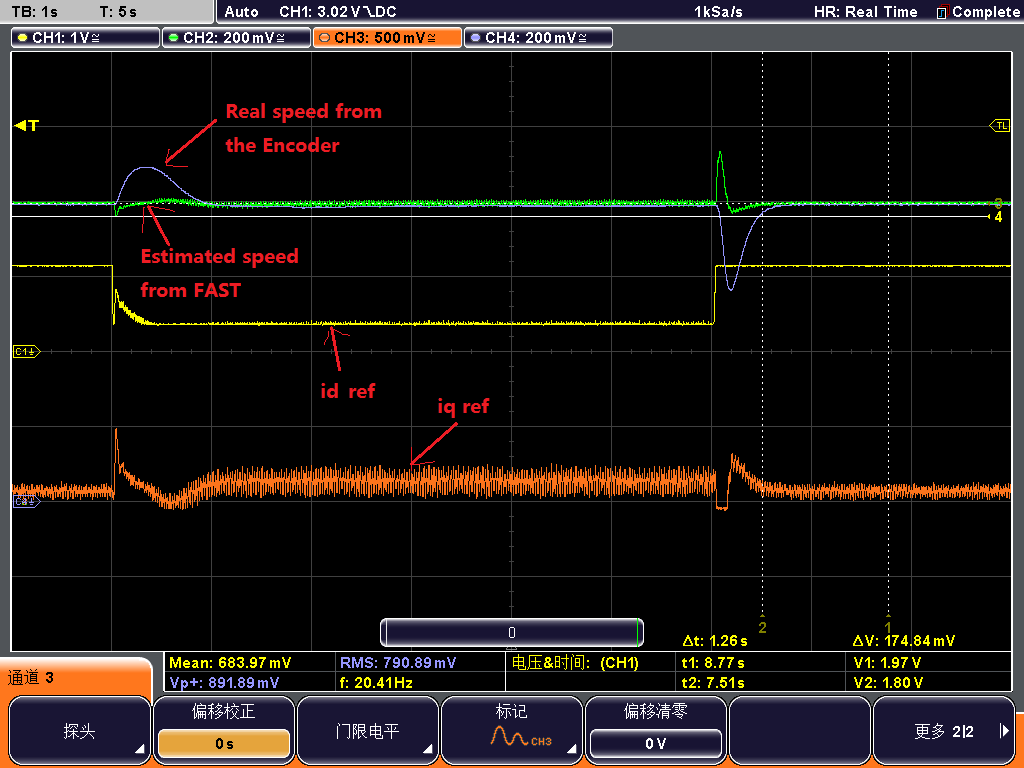
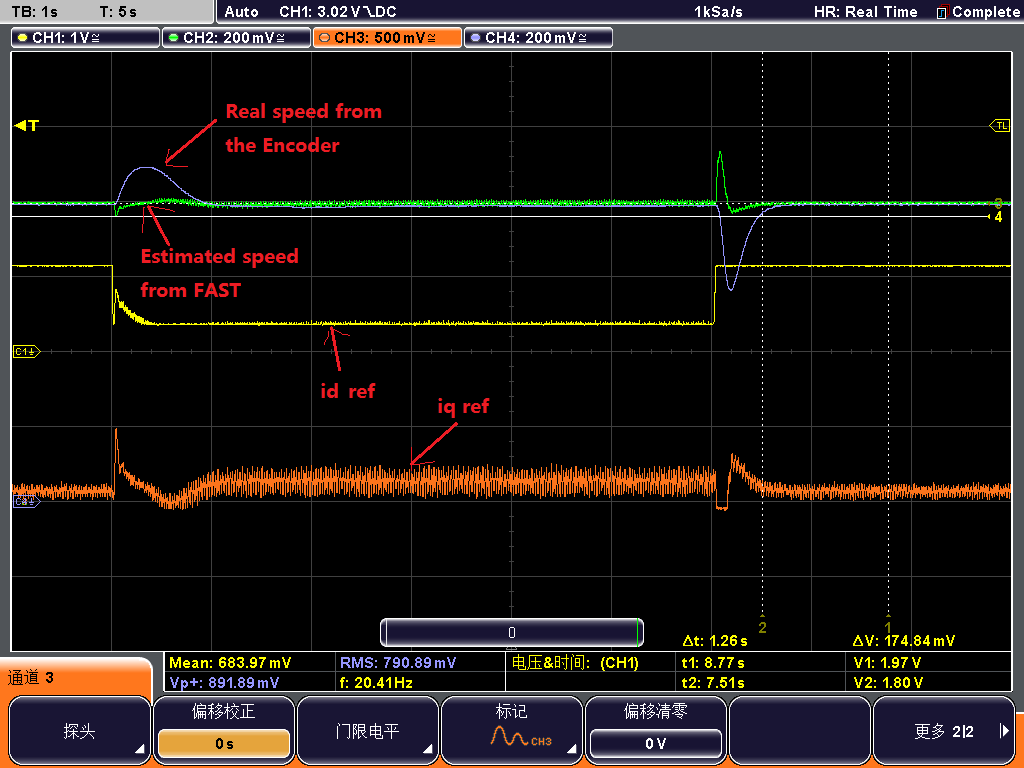
I use the high-voltage kits to run my ACIM. The dsp is 28069M, using the sensorless method of FAST module. But in the experiments, when i change the idref, i found the estimated speed from FAST is not accurate. Like the follow picture, the real speed is obtained from the encoder. At the time of changing idref, the two speeds have different values.
So how to solve this problem? thanks very much.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}