


Other Parts Discussed in Thread: DRV8305, CSD, MOTORWARE
Hello, our Motor was broken by OVER CURRENT while proj_lab10b was running.
Totally three Motors were broken by over-current.
Just one coil of U,V,W phase was burnout. But each broken coil was one of U,V,W, randomly.
F28069M device,DRV8305, Shunts and CSD MOSFETs are safe.
Regarding user_j1.h file, our Motor has 3 pole-pairs and the value of Current limit is set by 20.0 A.
<user_j1.h file>
#elif (USER_MOTOR == NEW_MOTOR)
#define USER_MOTOR_TYPE MOTOR_Type_Pm
#define USER_MOTOR_NUM_POLE_PAIRS (3)
:
:
#define USER_MOTOR_MAX_CURRENT (20.0)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (20.0)
#define USER_MOTOR_ENCODER_LINES (1)
#define USER_MOTOR_MAX_SPEED_KRPM (5.0)
:
:
The waveform of Motor current is as follows,
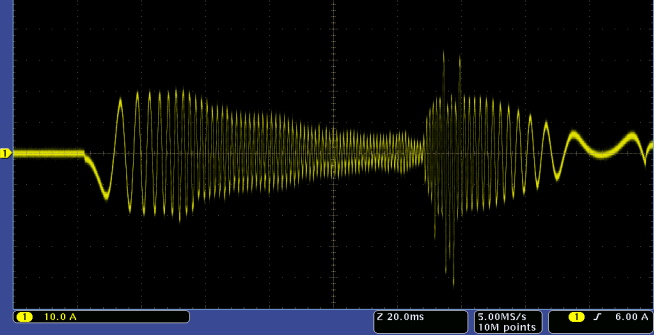
As I set USER_MOTOR_MAX_CURRENT = 20.0, the motor current should be within 20.0A.
But some waveforms were exceeded over 20.0A.
My MotorWare Version is MW16 and my CCS version is 6.1.2.
Could you please tell me how to resolve the over current problem ?
Best regards,
ay0689
