Hi everyone,
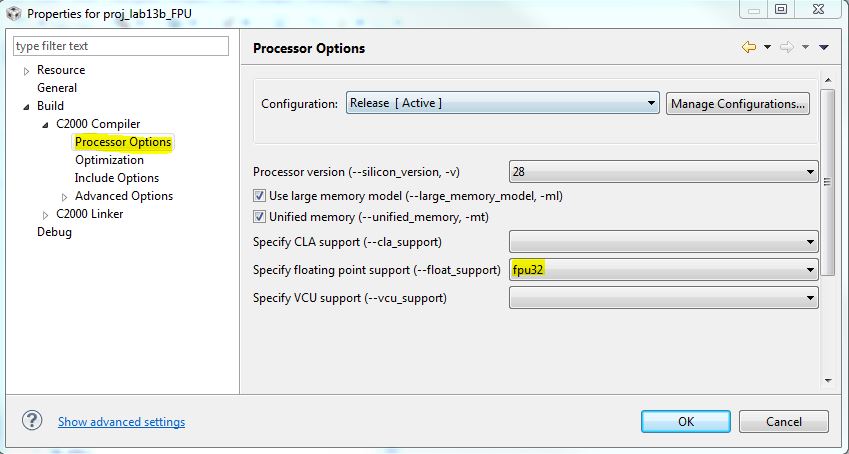
I'd like to change Lab13b to FPU32 based project.
Could you teach me this procedure?
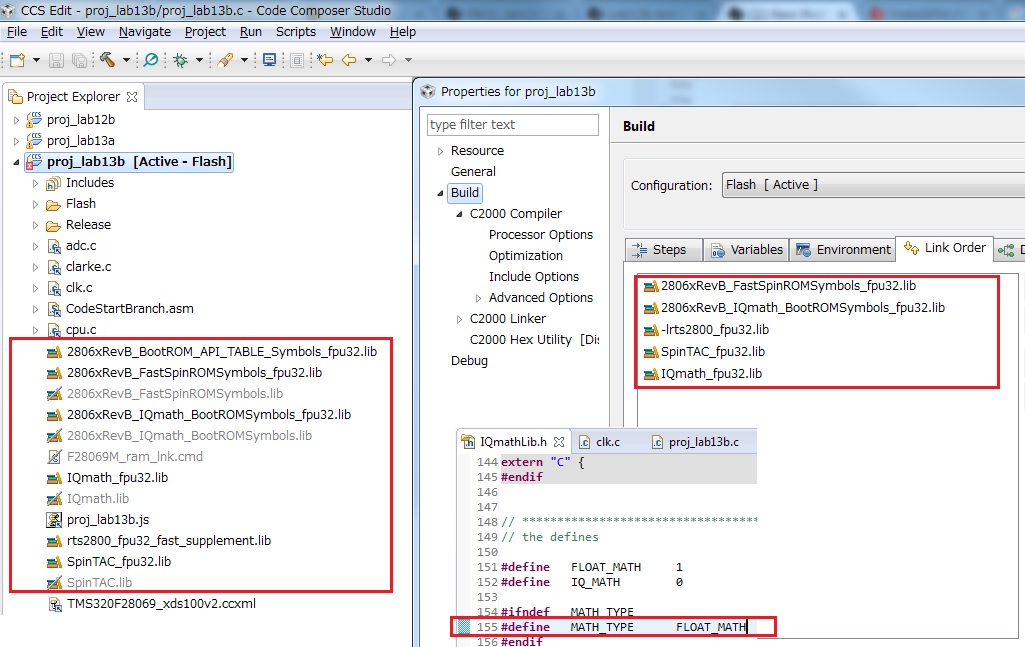
Now, I replaced "32b lib" with "fpu lib" and Link Order and MATH_TYPE as below, but got compile error(error_log.txt).
Best regards,
Sasaki
**** Build of configuration Flash for project proj_lab13b **** "C:\\ti\\ccsv6\\utils\\bin\\gmake" -k all 'Building file: C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.c' 'Invoking: C2000 Compiler' "C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/bin/cl2000" -v28 -ml -mt --float_support=fpu32 -O2 --include_path="C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/include" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/boards/drv8301kit_revD/f28x/f2806xM/src" --include_path="C:/ti/motorware/motorware_1_01_00_16" -g --define=FAST_ROM_V1p6 --define=FLASH --define=QEP --diag_warning=225 --display_error_number --preproc_with_compile --preproc_dependency="clarke.d" "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.c" >> Compilation failure subdir_rules.mk:21: recipe for target 'clarke.obj' failed "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 131: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 137: error #31: expression must have integral type 2 errors detected in the compilation of "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.c". gmake: *** [clarke.obj] Error 1 'Building file: C:/ti/motorware/motorware_1_01_00_16/sw/modules/ctrl/src/32b/ctrlQEP.c' 'Invoking: C2000 Compiler' "C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/bin/cl2000" -v28 -ml -mt --float_support=fpu32 -O2 --include_path="C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/include" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/boards/drv8301kit_revD/f28x/f2806xM/src" --include_path="C:/ti/motorware/motorware_1_01_00_16" -g --define=FAST_ROM_V1p6 --define=FLASH --define=QEP --diag_warning=225 --display_error_number --preproc_with_compile --preproc_dependency="ctrlQEP.d" "C:/ti/motorware/motorware_1_01_00_16/sw/modules/ctrl/src/32b/ctrlQEP.c" >> Compilation failure subdir_rules.mk:42: recipe for target 'ctrlQEP.obj' failed "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 131: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 137: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen.h", line 129: error #31: expression must have integral type "C:\ti\motorware\motorware_1_01_00_16\sw\modules\ctrl\src\32b\ctrlQEP.h", line 1862: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen_current.h", line 257: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen_current.h", line 262: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen_current.h", line 267: error #31: expression must have integral type 7 errors detected in the compilation of "C:/ti/motorware/motorware_1_01_00_16/sw/modules/ctrl/src/32b/ctrlQEP.c". gmake: *** [ctrlQEP.obj] Error 1 'Building file: C:/ti/motorware/motorware_1_01_00_16/sw/modules/enc/src/32b/enc.c' 'Invoking: C2000 Compiler' "C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/bin/cl2000" -v28 -ml -mt --float_support=fpu32 -O2 --include_path="C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/include" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/boards/drv8301kit_revD/f28x/f2806xM/src" --include_path="C:/ti/motorware/motorware_1_01_00_16" -g --define=FAST_ROM_V1p6 --define=FLASH --define=QEP --diag_warning=225 --display_error_number --preproc_with_compile --preproc_dependency="enc.d" "C:/ti/motorware/motorware_1_01_00_16/sw/modules/enc/src/32b/enc.c" >> Compilation failure subdir_rules.mk:56: recipe for target 'enc.obj' failed "C:/ti/motorware/motorware_1_01_00_16/sw/modules/enc/src/32b/enc.c", line 309: error #31: expression must have integral type 1 error detected in the compilation of "C:/ti/motorware/motorware_1_01_00_16/sw/modules/enc/src/32b/enc.c". gmake: *** [enc.obj] Error 1 'Building file: C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src/hal.c' 'Invoking: C2000 Compiler' "C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/bin/cl2000" -v28 -ml -mt --float_support=fpu32 -O2 --include_path="C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/include" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/boards/drv8301kit_revD/f28x/f2806xM/src" --include_path="C:/ti/motorware/motorware_1_01_00_16" -g --define=FAST_ROM_V1p6 --define=FLASH --define=QEP --diag_warning=225 --display_error_number --preproc_with_compile --preproc_dependency="hal.d" "C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src/hal.c" >> Compilation failure subdir_rules.mk:84: recipe for target 'hal.obj' failed "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 131: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 137: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen.h", line 129: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen_current.h", line 257: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen_current.h", line 262: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen_current.h", line 267: error #31: expression must have integral type 6 errors detected in the compilation of "C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src/hal.c". gmake: *** [hal.obj] Error 1 'Building file: C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/src/proj_lab13b.c' 'Invoking: C2000 Compiler' "C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/bin/cl2000" -v28 -ml -mt --float_support=fpu32 -O2 --include_path="C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/include" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/boards/drv8301kit_revD/f28x/f2806xM/src" --include_path="C:/ti/motorware/motorware_1_01_00_16" -g --define=FAST_ROM_V1p6 --define=FLASH --define=QEP --diag_warning=225 --display_error_number --preproc_with_compile --preproc_dependency="proj_lab13b.d" "C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/src/proj_lab13b.c" >> Compilation failure subdir_rules.mk:147: recipe for target 'proj_lab13b.obj' failed "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen_current.h", line 257: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen_current.h", line 262: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen_current.h", line 267: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 131: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 137: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen.h", line 129: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/ctrl/src/32b/ctrlQEP.h", line 1862: error #31: expression must have integral type 7 errors detected in the compilation of "C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/src/proj_lab13b.c". gmake: *** [proj_lab13b.obj] Error 1 'Building file: C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen.c' 'Invoking: C2000 Compiler' "C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/bin/cl2000" -v28 -ml -mt --float_support=fpu32 -O2 --include_path="C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/include" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/boards/drv8301kit_revD/f28x/f2806xM/src" --include_path="C:/ti/motorware/motorware_1_01_00_16" -g --define=FAST_ROM_V1p6 --define=FLASH --define=QEP --diag_warning=225 --display_error_number --preproc_with_compile --preproc_dependency="svgen.d" "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen.c" >> Compilation failure subdir_rules.mk:189: recipe for target 'svgen.obj' failed "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen.h", line 129: error #31: expression must have integral type 1 error detected in the compilation of "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen.c". gmake: *** [svgen.obj] Error 1 'Building file: C:/ti/motorware/motorware_1_01_00_16/sw/modules/user/src/32b/user.c' 'Invoking: C2000 Compiler' "C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/bin/cl2000" -v28 -ml -mt --float_support=fpu32 -O2 --include_path="C:/ti/ccsv6/tools/compiler/c2000_15.12.3.LTS/include" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/modules/hal/boards/drv8301kit_revD/f28x/f2806x/src" --include_path="C:/ti/motorware/motorware_1_01_00_16/sw/solutions/instaspin_motion/boards/drv8301kit_revD/f28x/f2806xM/src" --include_path="C:/ti/motorware/motorware_1_01_00_16" -g --define=FAST_ROM_V1p6 --define=FLASH --define=QEP --diag_warning=225 --display_error_number --preproc_with_compile --preproc_dependency="user.d" "C:/ti/motorware/motorware_1_01_00_16/sw/modules/user/src/32b/user.c" >> Compilation failure subdir_rules.mk:217: recipe for target 'user.obj' failed "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 131: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/clarke/src/32b/clarke.h", line 137: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/svgen/src/32b/svgen.h", line 129: error #31: expression must have integral type "C:/ti/motorware/motorware_1_01_00_16/sw/modules/ctrl/src/32b/ctrl.h", line 2142: error #31: expression must have integral type 4 errors detected in the compilation of "C:/ti/motorware/motorware_1_01_00_16/sw/modules/user/src/32b/user.c". gmake: *** [user.obj] Error 1 gmake: Target 'all' not remade because of errors. **** Build Finished ****