Part Number: TMS320F28377D
Other Parts Discussed in Thread: SN65HVD235
Hi,
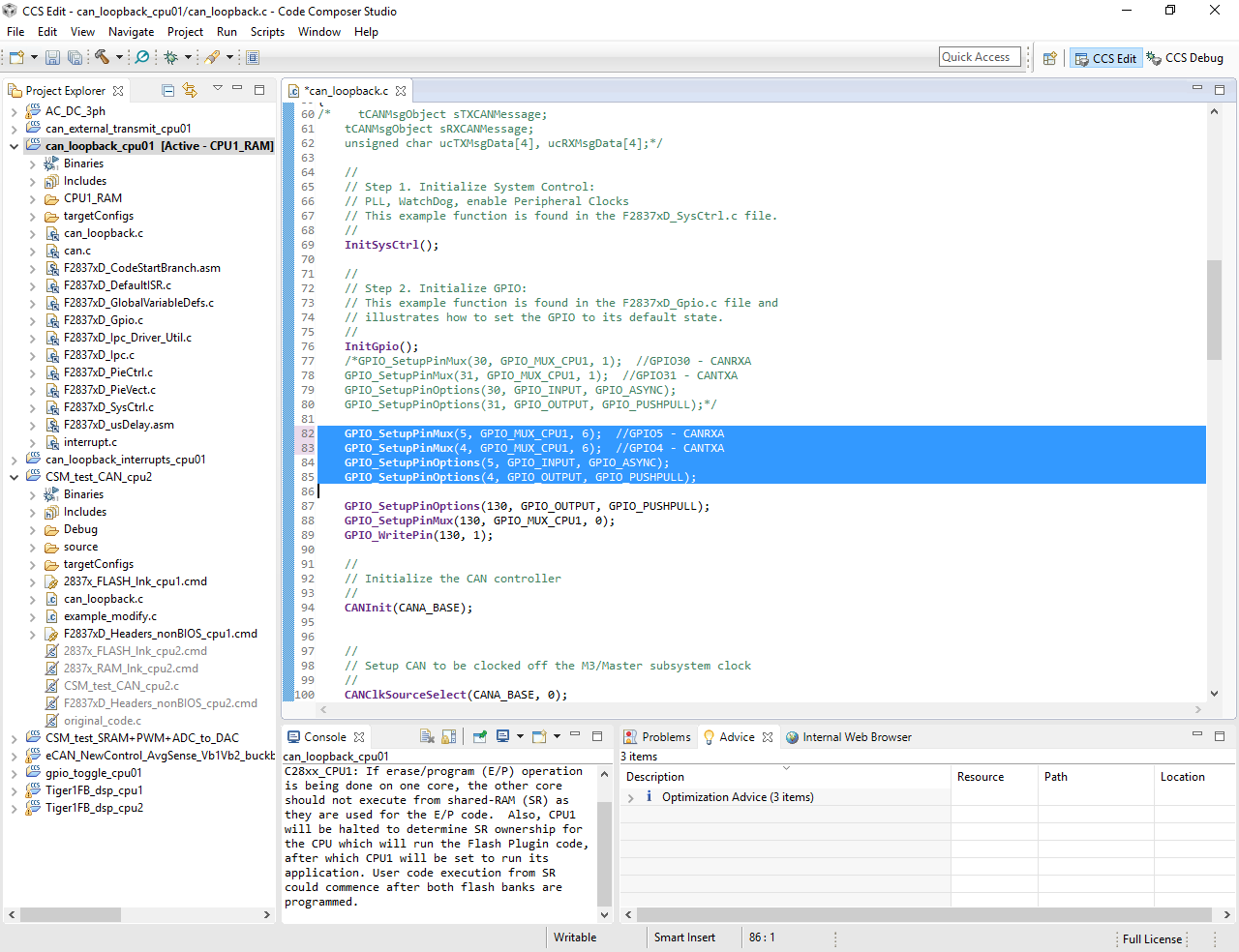
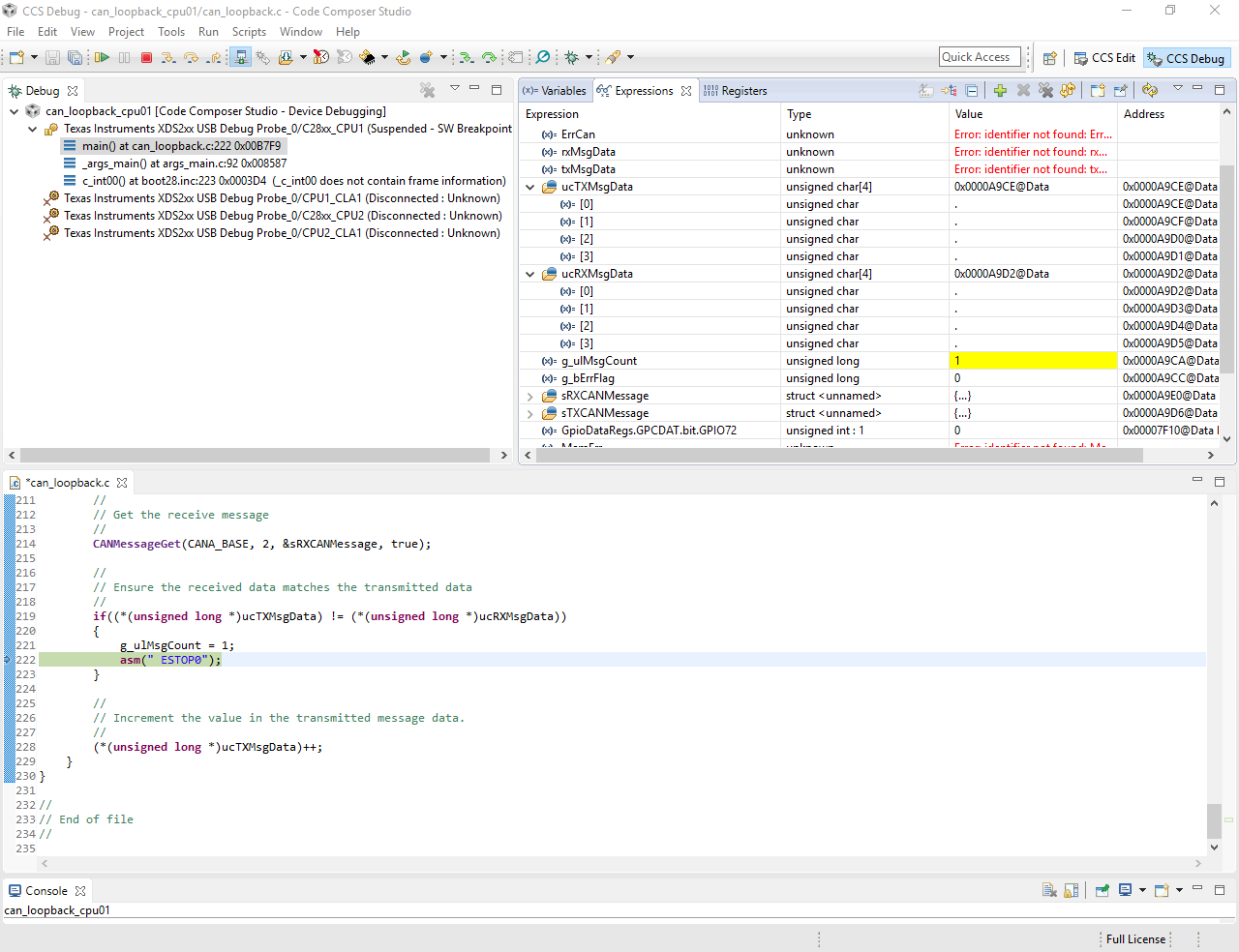
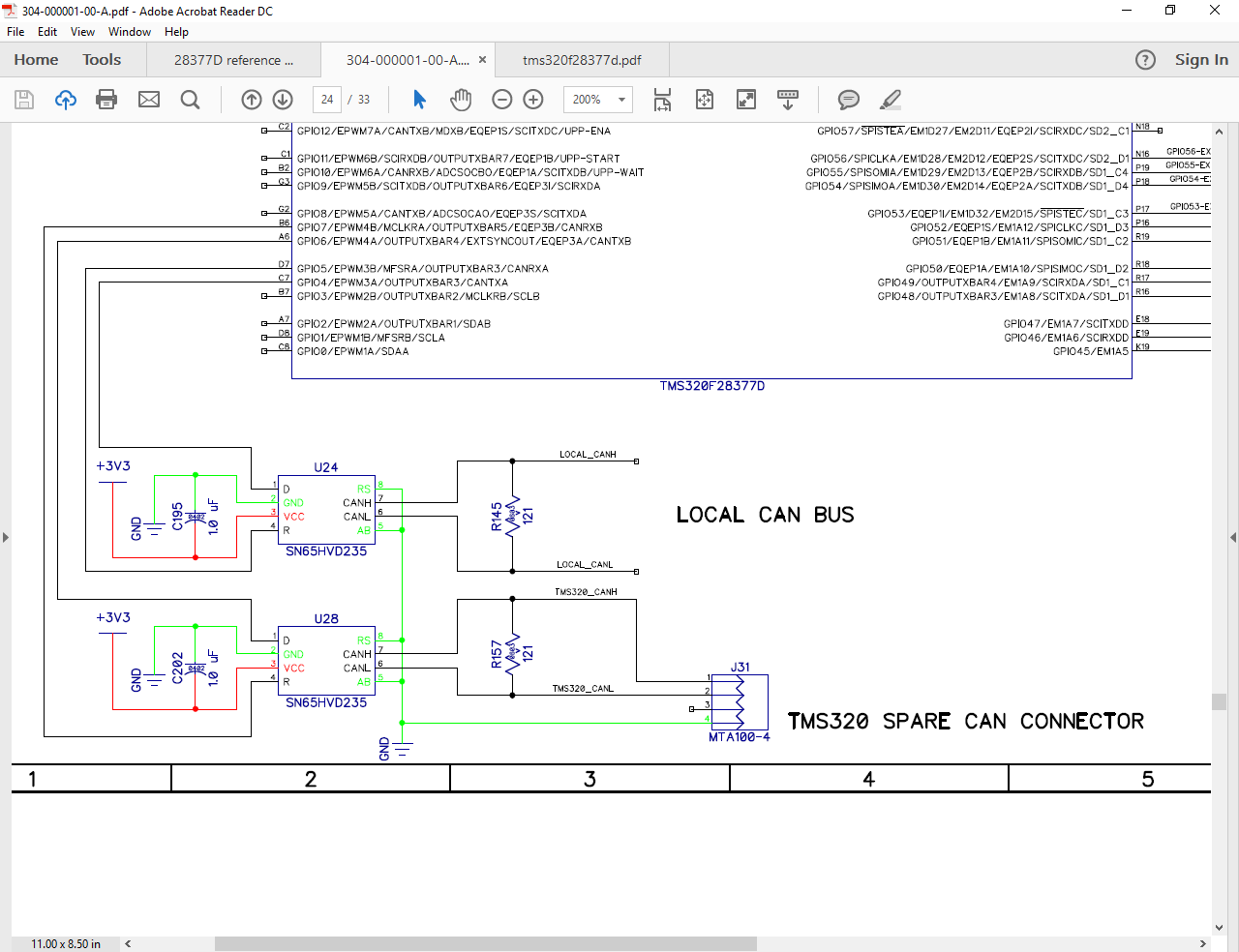
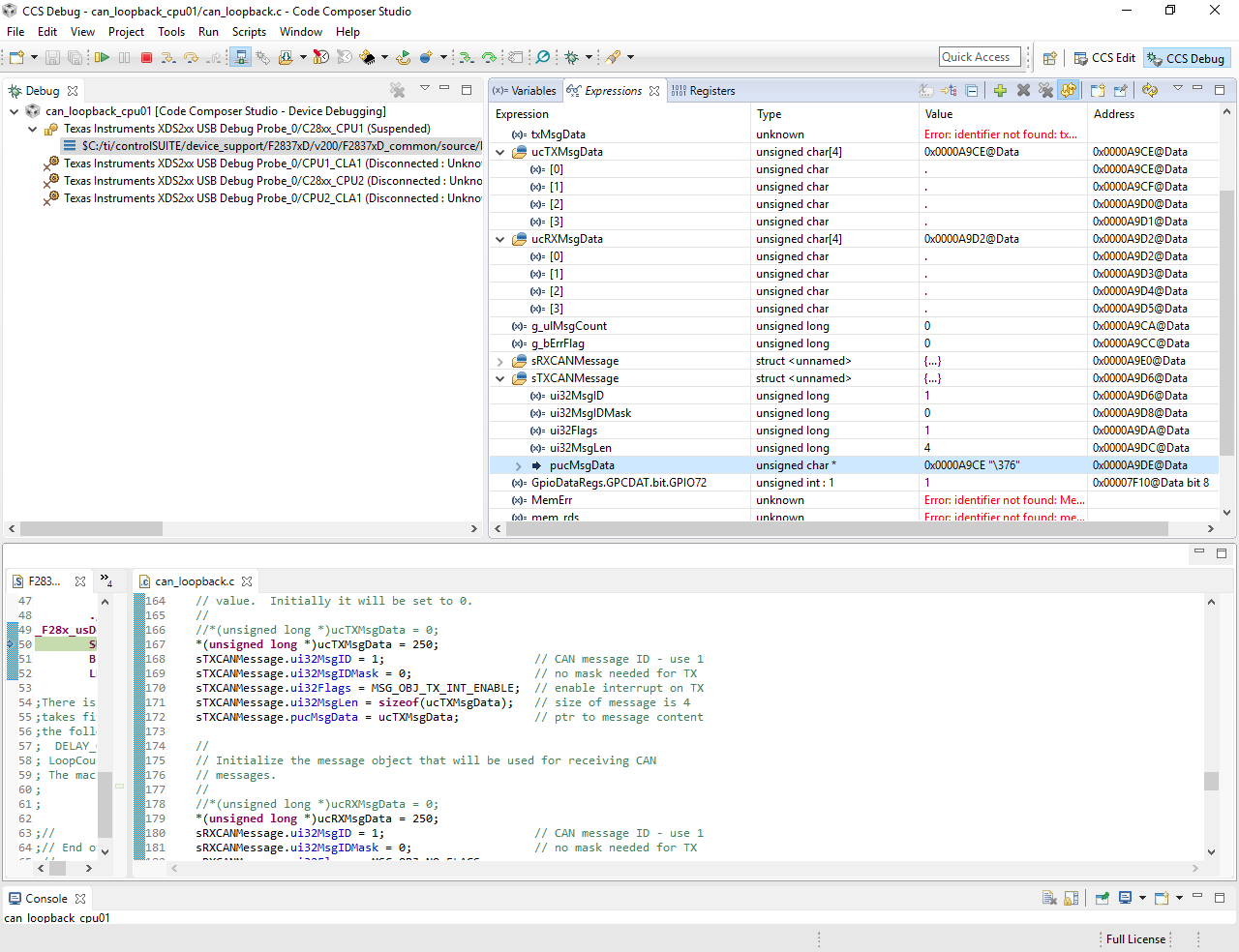
I tried to start CAN communication from external loopback example. What I did is just modifying GPIO pin which we use (GPIO 5/4), and everything else is kept unchanged. But when I debugged it, I cannot even observe value written in array for transmitting (0 in example), which shows as below. And then the program stops because of the mismatch. The program and debugging view is shown below, also attached schematic for CAN connection. I programmed CAN for 28032 before, but 28377d provides less direct view on things, which makes me very confused. Can anyone give hints on what happens? Thanks a lot.