Part Number: TMS320F28069F
Hello
I want to run a sensored torque control using an encoder.
I have adapted Lab4a in order to do that:
I have initiated the encoder handles etc
and I also have passed the encoder's read to the control in mainISR function
CTRL_run(ctrlHandle,halHandle,&gAdcData,&ENC_getElecAngle(encHandle));
I have perform all the steps gives in the spruhf1 except this one (QEPctrl.h)
angle_pu = EST_getAngle_pu(obj->estHandle);
// Update electrical angle from ENC module
angle_pu = ENC_getElecAngle(encHandle);
I have not modified this because in Lab12 labs these lines are not included
Is this correct?
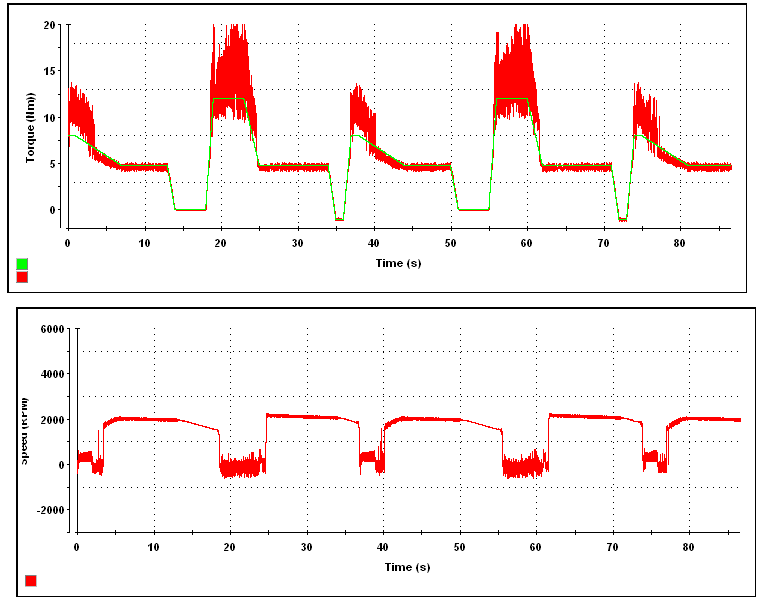
The control works correctly but it seems to have more torque Ripple that the one without encoder (Lab4a). Encoder resolution is 512 (I think it should be enough)
Is there any missed?
I have read in previous post that speed feedback is not provided by the encoder firmware. Is it true?
I have another question
Due to my application (Powertrain with in wheel motors) encoder aligment phase is no desirable for real application. We have included a dual incremental and absolute encoder. Is there any example about the way to perform the offset initialization. I have performes some multiples encoder aligment process (during Rs recalculation step) and depending on the motor initial position (previous to Rs recalibration step) we have obtained four position: 1591, 1079, 567, 55 (the motor has 4 pole pairs, and we use a 2048 abs encdder). Depending the test these positions have a desviation of +/-50. My idea is to used this pre-calculated position to set the offset. Is this desviation critical to do that? Is there example about the way in which these points can be transformed into a valid offset
Thank you in advace
Borja Gómez