Other Parts Discussed in Thread: CONTROLSUITE, C2000WARE
Tool/software: Code Composer Studio
Hallo,
is it possilbe to creat two PWM signals using HRPWM for the period and the duty cycle and use a fix deadband?
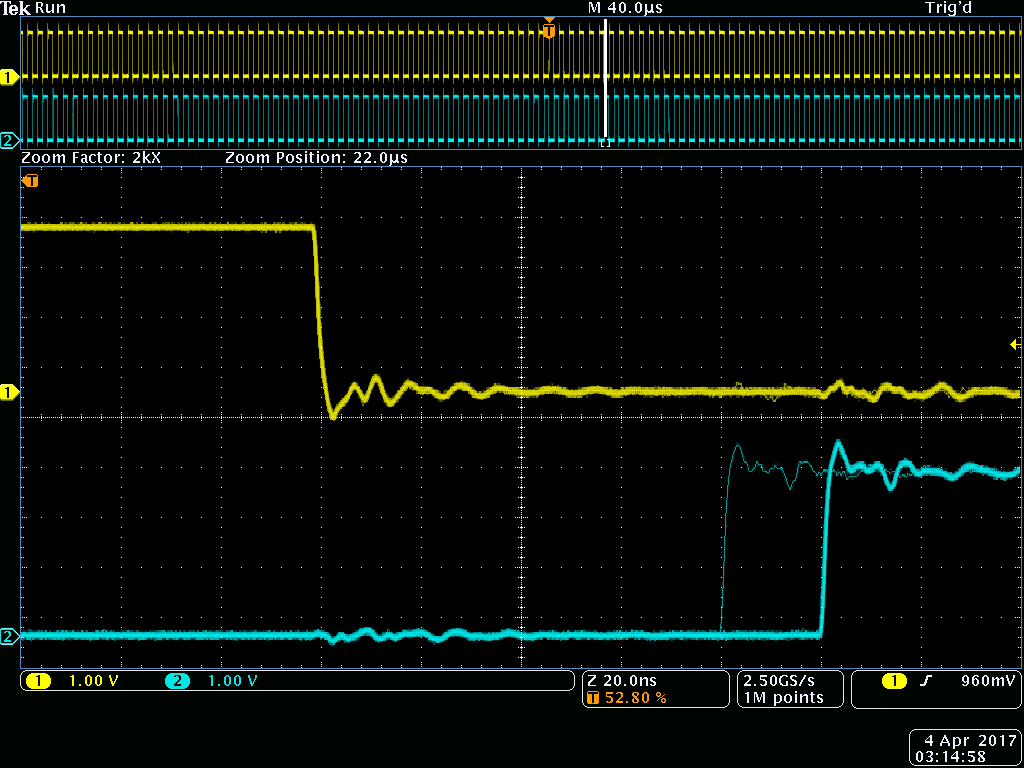
I want do create EPWMxA with a specific period and duty cycle and EPWMxB should be the inverted signal of A with the same deadband. I modified the hrpwm_prdupdown_sfo_cpu01 Project from the controlSUITE examples. But there is always a jitter on channel B.
How can i avoid the jitter?
//
// ePWM channel register configuration with HRPWM
// ePWMxA toggle low/high with MEP control on Rising edge
//
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Disable TBCLK within the EPWM
EDIS;
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW; // set Shadow load
EPwm2Regs.TBPRD = period; // PWM frequency = 1/(2*TBPRD)
EPwm2Regs.CMPA.bit.CMPA = period / 2; // set duty 50% initially
EPwm2Regs.CMPA.bit.CMPAHR = (1 << 8); // initialize HRPWM extension
EPwm2Regs.CMPB.bit.CMPB = period / 2; // set duty 50% initially
EPwm2Regs.CMPB.all |= 1;
EPwm2Regs.TBPHS.all = 0;
EPwm2Regs.TBCTR = 0;
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Select up-down
// count mode
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1; // TBCLK = SYSCLKOUT
EPwm2Regs.TBCTL.bit.FREE_SOFT = 11;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO_PRD; // LOAD CMPA on CTR = 0
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO_PRD;
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.AQCTLA.bit.CAU = AQ_SET; // PWM toggle high/low
EPwm2Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.CBU = AQ_SET; // PWM toggle high/low
EPwm2Regs.AQCTLB.bit.CBD = AQ_CLEAR;
EALLOW;
EPwm2Regs.HRCNFG.all = 0x0;
EPwm2Regs.HRCNFG.bit.EDGMODE = HR_BEP; // MEP control on
// both edges.
EPwm2Regs.HRCNFG.bit.CTLMODE = HR_CMP; // CMPAHR and TBPRDHR
//changed // HR control.
EPwm2Regs.HRCNFG.bit.HRLOAD = HR_CTR_ZERO_PRD; // load on CTR = 0
// and CTR = TBPRD
EPwm2Regs.HRCNFG.bit.EDGMODEB = HR_BEP; // MEP control on
// both edges
EPwm2Regs.HRCNFG.bit.CTLMODEB = HR_CMP; // CMPBHR and TBPRDHR
// HR control
EPwm2Regs.HRCNFG.bit.HRLOADB = HR_CTR_ZERO_PRD; // load on CTR = 0
// and CTR = TBPRD
EPwm2Regs.HRCNFG.bit.AUTOCONV = 1; // Enable autoconversion for
// HR period
EPwm2Regs.HRPCTL.bit.TBPHSHRLOADE = 1; // Enable TBPHSHR sync
// (required for updwn
// count HR control)
EPwm2Regs.HRPCTL.bit.HRPE = 1; // Turn on high-resolution
// period control.
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 1; // Enable TBCLK within
// the EPWM
EPwm2Regs.TBCTL.bit.SWFSYNC = 1; // Synchronize high
// resolution phase to
// start HR period
EDIS;
// ohne EPwm2Regs.DBCTL.bit.POLSEL EPwm2Regs.DBRED EPwm2Regs.DBFED PWM2A = PWM2B
// Setzen der Totzeit
// Active Low complementary PWMs - setup the deadband
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // rising edge delay and falling edge delay enabled
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // Polarity select Control EPWMxB is inverted || 10: Active high complementary (AHC). EPWMxB is inverted.
EPwm2Regs.DBCTL.bit.IN_MODE = DBA_ALL; // Dead-Band Input Mode Control: EPWMxA is source for rising and falling edge
EPwm2Regs.DBRED = EPWM2_DB; // rising edge delay value
EPwm2Regs.DBFED = EPWM2_DB; // falling edge delay value