Other Parts Discussed in Thread: TMS320F28054
Tool/software: Code Composer Studio
Hi,
On the basis of the lab7, I’m trying to estimate the Rs online, working with my own HW and TMS320F28054 microcontroller.
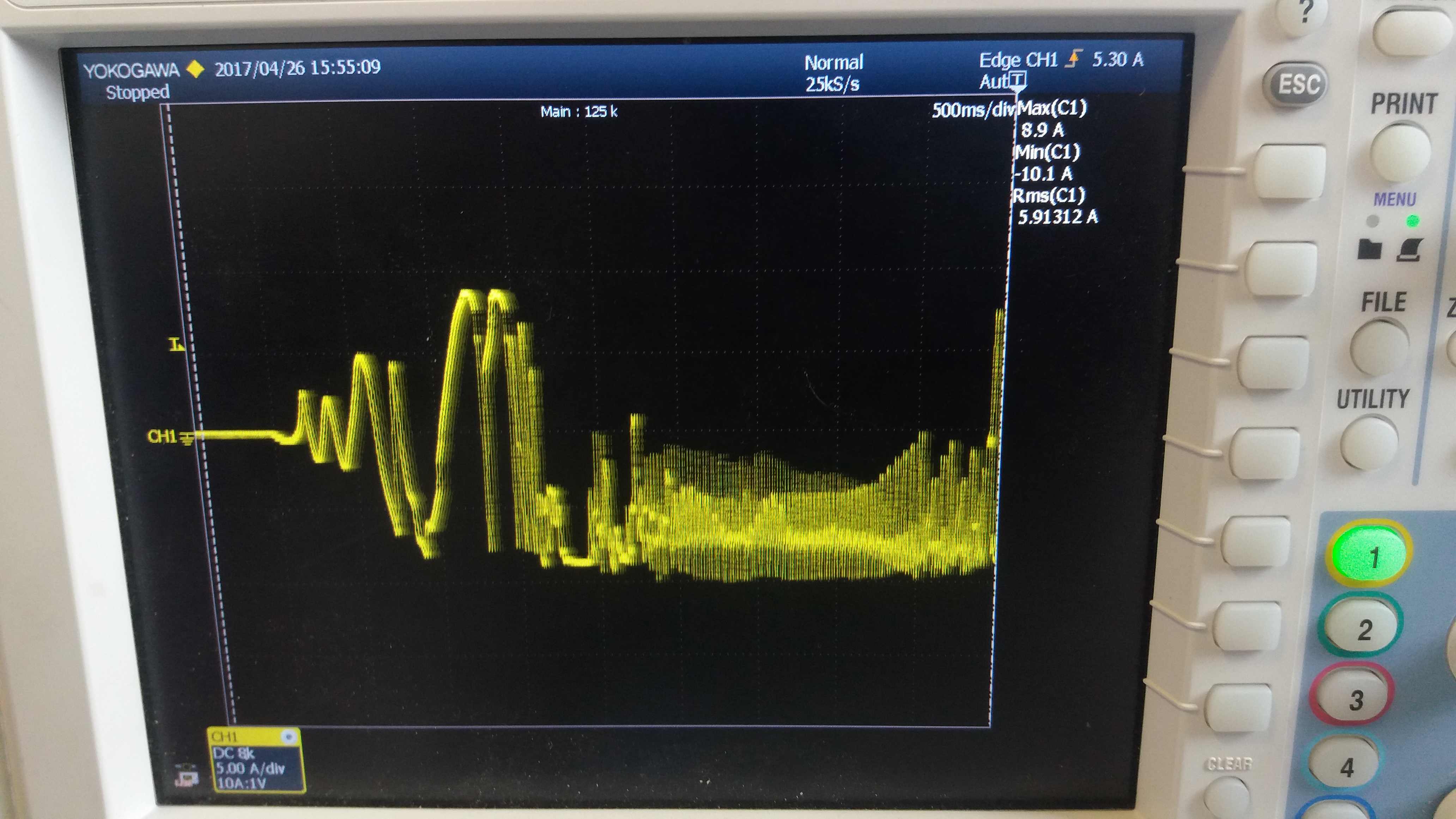
When I set the Flag_enableSys and Flag_Run_identify, the motor identification starts, and the Rs estimated is quite accurate (real value à 1,35 homs, estimated value à 1,6 ohms, the motor is a little bit heated). But, after that, the Rs online is oscillating (see picture below). The RsOnLineCurrent_A=0.4, and USER_MOTOR_MAX_CURRENT=8.

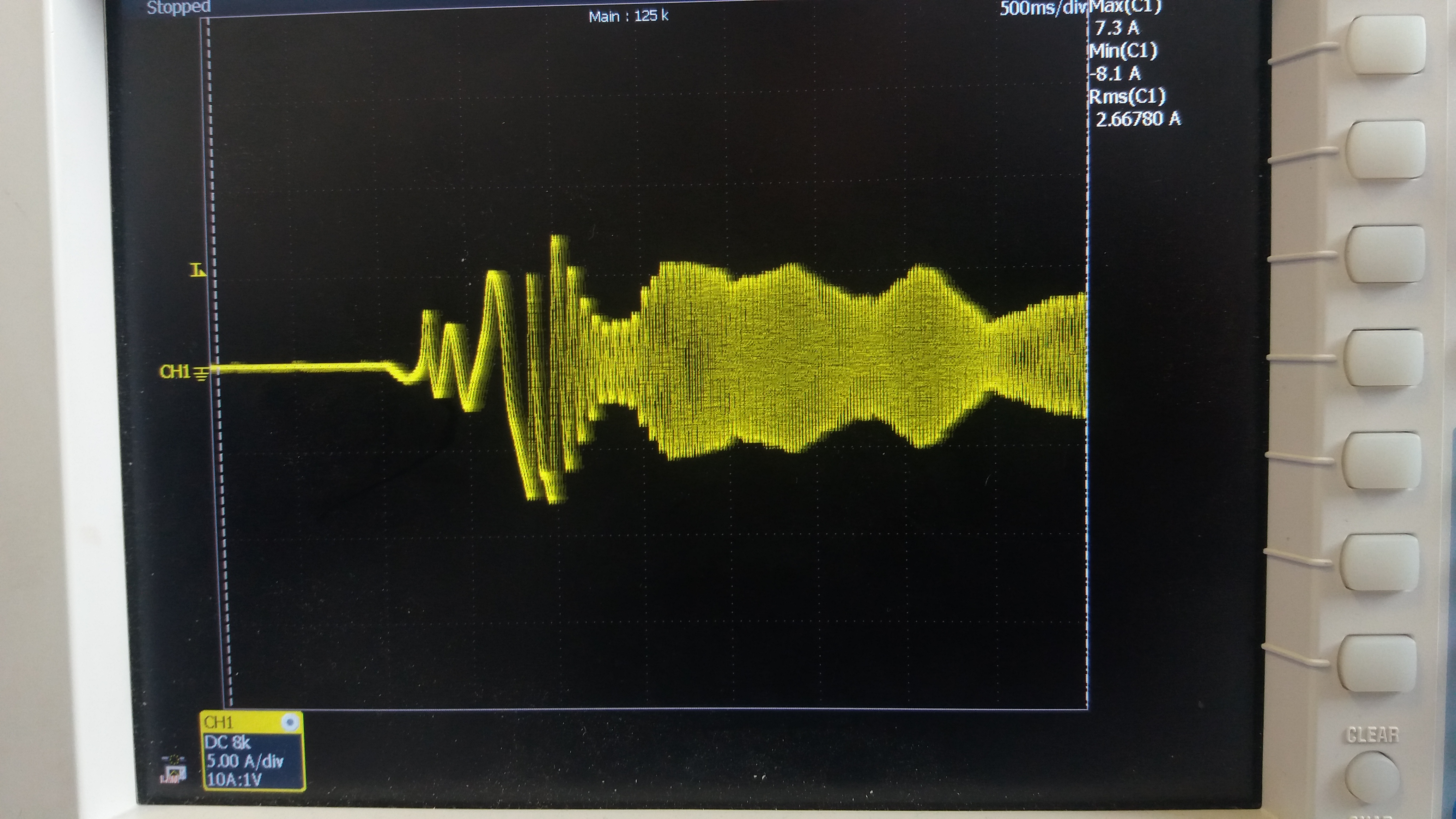
In this situation, the motor doesn’t spin smoothly, so the current is under control (see picture below).
The measure the Rs online, I followed the lab7 (copy and paste runRsOnLine function.