


Part Number: TMS320F28062F
Other Parts Discussed in Thread: MOTORWARE
Hi E2E,
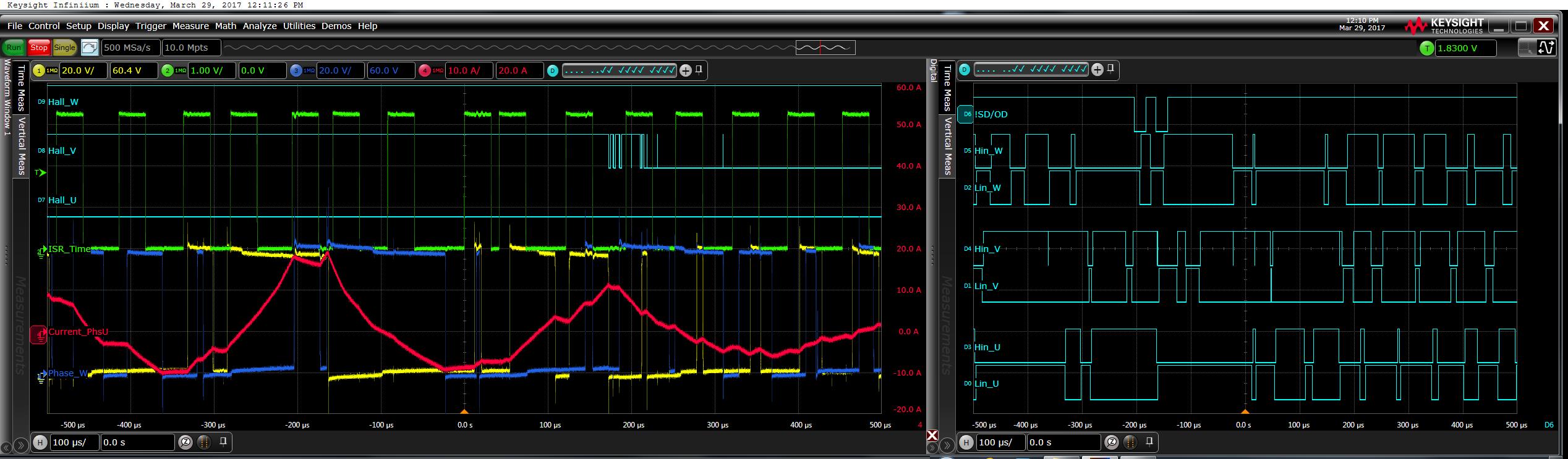
I am bringing up a new board design and am encountering an interesting issue using a TMS320F28062F with Motorware lab11a. I currently have my user motor max current limit set to 3A just to get things up and running which works extremely well at times. I have been monitoring the time and consistency of mainISR with a debug pin set high at the start and set low at the end of the function and have seen some inconsistency and am wondering where this is coming from. Below is a scope capture of the erratic mainISR behavior along with the loss of current control. Also shown is our PWM signals, phase current and phase voltage.
Some other information that may be of value is we are running at 15kHz PWM with USER_NUM_CTRL_TICKS_PER_SPEED_TICK and USER_NUM_CTRL_TICKS_PER_TRAJ_TICK set to 15 to match PWM frequency. USER_NUM_PWM_TICKS_PER_ISR_TICK, USER_NUM_ISR_TICKS_PER_CTRL_TICK, USER_NUM_CTRL_TICKS_PER_CURRENT_TICK and USER_NUM_CTRL_TICKS_PER_EST_TICK are all set to 1.
Does anyone have any insight into why my Main isr is so inconsistent?
Regards,
Noah

