Part Number: TMS320F28035
Other Parts Discussed in Thread: OPA320
In looking at the F2803x datasheet, I'm trying to determine two things:
- What are all the strategies that can be deployed for ADC calibration, including steps necessary to implement them?
- self-recalibration
- offset calibration (if self-recalibration is occuring, is there nothing else that can improve this?)
- two point gain calibration
- temperature compensation
- etc...
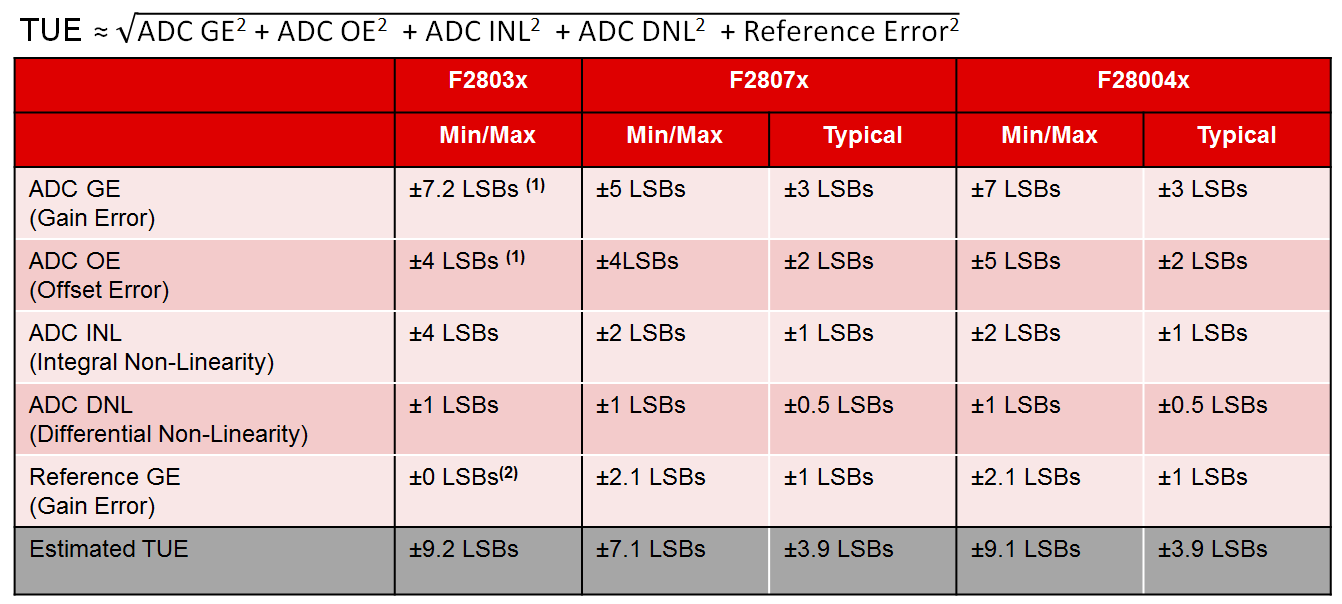
- After deploying all the necessary ADC calibration, what is the resulting total unadjusted error?
Let's assume that periodic self-recalibration occurs. It appears as though the INL and DNL are not additive. This would leave INL as the worst of the two at 4 counts. What I don't understand is whether what other errors are additive:
- Channel-to-Channel offset and gain variation does not appear to be an absolute error added to the total unadjusted error of a given channel.
- gain error appears to be additive, and the total unadjusted error added would be a factor of the accuracy of a two point gain calibration reference.
- If gain calibration happens on only one channel, does the channel-to-channel variation come back into play?
- The temperature coefficient would appear to be additive to the total unadjusted error. It could to some extent be compensated for with a temperature measurement.
- How much of the temperature coefficient is accounted for in the periodic self-recalibration?
In summary, I'm trying to understand what all goes into determining the absolute worst case total unadjusted error, and what strategies can be deployed to minimize it?
Thanks,
Stuart