Part Number: TMS320F28335
Tool/software: Code Composer Studio
Hello,
I think I need help with something. I am using ezdsp f28335 to implement closed loop integral control on a boost converter and I discovered that once the output reaches the reference, it waits for a second or two and continues to rise gradually up to about 13v and then starts to decrease until it crashes. I am boosting 3v to 8v. I have implemented the circuit using op-amps before so I know integral control is should be sufficient. I am using Ki = 5.
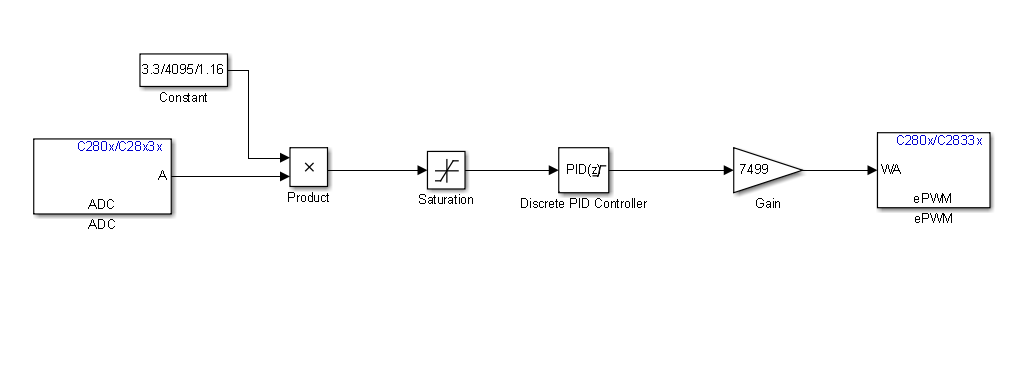
In the model below, I am feeding the error signal through the ADC to the PID controller. Ordinarily, as the duty cycle increases the error should approach zero and the duty cycle which is the output of the integrator should become constant but in my case when the error gets to zero the duty cycle doesn't stop increasing, it is as if -ve error is also causing an increase in duty cycle. This should not be!
Kindly advise me.
Thanks.

fig1 - epwm, output voltage, gate driver pulse