


Hello,
I have a problem in identifying the inertia of a new motor, basically i always get error 2004 i tried starting from 4 krpm in gMotorVars.SpinTAC.VelIdGoalSpeed_krpm and reduced it to 0.01krpm with a step of 0.5 krpm as describe on the lab guide page 229, but whitout result, the motor does not turn and consumes a lot of current around 30 A.
Previous labs I have successfully completed and obtained the values of resistance to moisture etc.
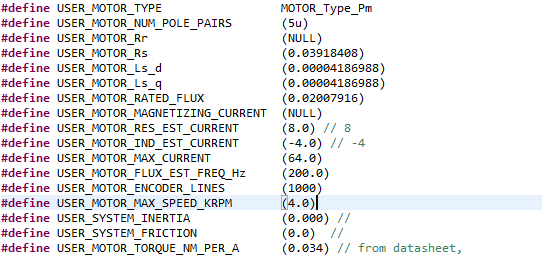
Below the setting that I use to identify the inertia.

Thanks for any hints.
