Hi
I'm using TMDSHVMTRPFCKIT v2.1.
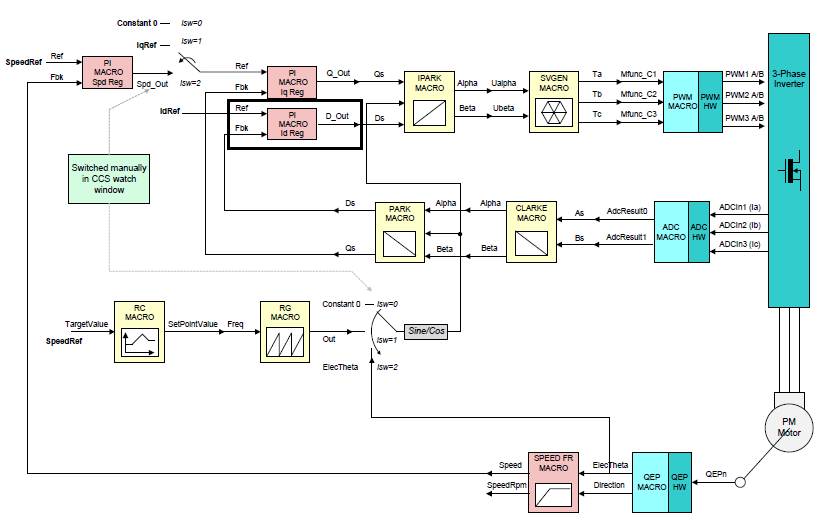
when SpeedRef is constant_IQ(0.333), every time I turn the motor, D-axis current PI macro out value change to approx. -0.02 to -0.05.
why does this happen? I can't understand. Q-axis output is almost constant.
For this reason, I can't calculate exact Vd value from current PI out.
Please explain why this is happening!