


Tool/software: Starterware
hello,
Q1: i found motor perform different trajectories at st_obj.vel.id.cfg.Sensorless is true or false.
true:
false: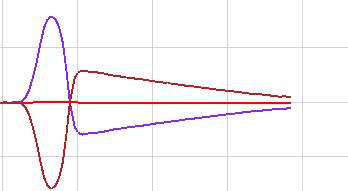 (blue line is the actual speed)
(blue line is the actual speed)
if i only use encoder result for speed feedback, may i get the similar results by different trajectories?
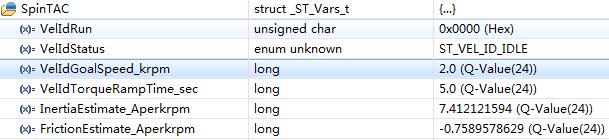
Q2: i set VelIdGoalSpeed_krpm = 1, but motor just reached 790RPM in the process of performing the inertia identification.
A similar situation, VelIdGoalSpeed_krpm = 2,motor just reached 1550+RPM.
What caused this phenomenon?
I confirm that my sensored feedback is correct, motor runs well without load by lab12b.
Q3:i obtained a negative result. if i use this value, the running of the motor under load is worse.
So I guess the result I got was wrong.
i use sensored feedback(ST_runPosConv result) and FOC PI control, motor can be carried with full load and can be operated stably.
But I would like to use the inertial control system to achieve better results.

