


Tool/software: Code Composer Studio
Hi all,
I am working on CAN based message transfer between two microcontrollers in Code Composer Studio software environment. The block diagram structure of the communication interface is as below:
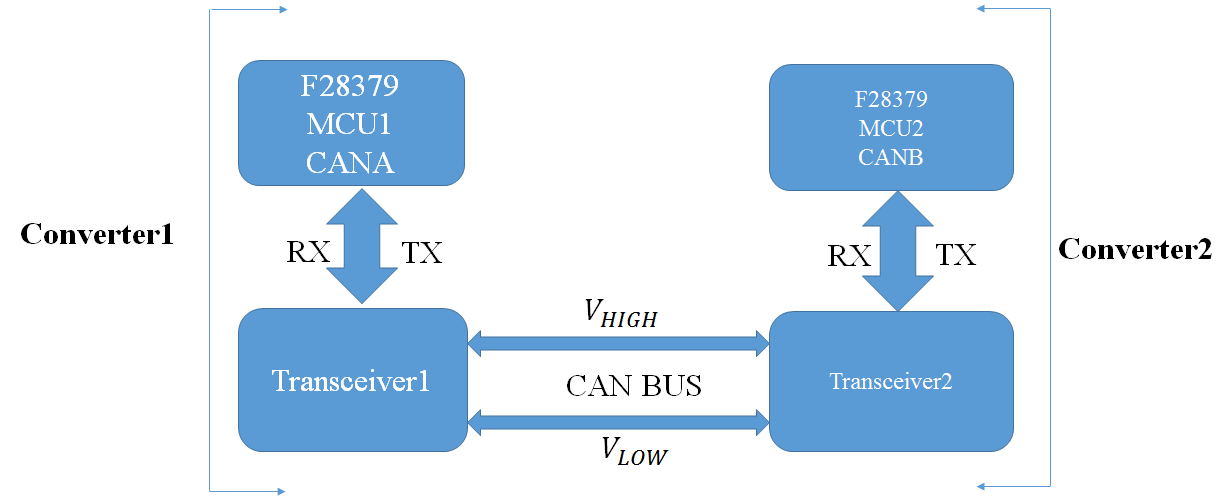
With reference to the above diagram, the application which needs to be developed through programming consists of several steps:
In case of a Fault occuring in Converter2 (DC-AC 3-phase Inverter),
(a) Fault in Conv2 has to be sensed by MCU2.
(b) MCU2 has to communicate the fault status to MCU1.
(c) Accordingly MCU1 will generate the gating signals to Conv1 in order to reduce the DC link voltage to zero.
(d) Finally the Input voltage of Conv2 will be zero, thereby the same will stopped working and supplying 3-phase output power to the load.
I will be highly obliged if someone can suggest the programming to be done for the situation mentioned above.
Thanking You.
Regards
Sumanta
