Hi
I'm using TMDSHVMTRPFCKIT & HVMotorCtrol+pfcKit_v2.1/HVPM_Sensored_Servo project.
'HVPM_Sensored_Servo' project basically included math_blocks/v4.1
The SVGEN code used in version3 and version4 is different.
Version 4 SVGEN code is very simple.
But, unlike version 3, there is no detailed description about below code.
I have 3 question.
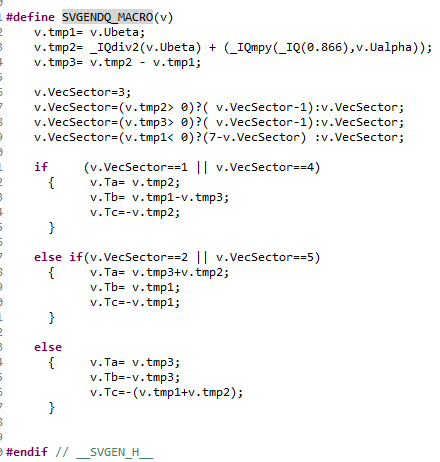
1. Is there theoretical document for SVGENDQ_MACRO of version 4?
if not, can you explain the code?
2. The code is different, but the output Ta, Tb, and Tc of version 3&4 values are the same?
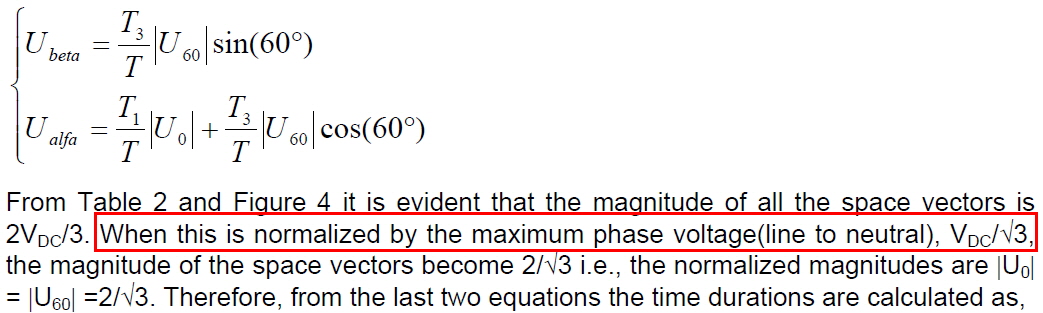
3. In version 3, variable is normalized by the maximum phase voltage, Vdc/sqrt(3)
Therefore, real Ubeta value is Ubeta * Vdc/sqrt(3), right?