Hi
I use TMDSHVMTRPFCKIT.(R1.1) and PMSM.
Speed control is good.
But when I look at the value of the PI output using the pmsm dq model equation, it does not fit the theory.
The current PI controller output becomes Vd, Vq.
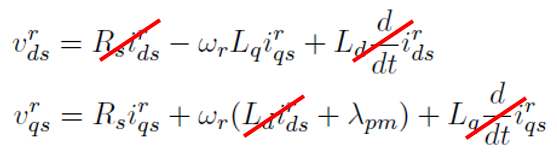
When it is in steady state, Vd, Vq should be calculated according to the following equation.
But when I calculate Vd with equation -wr*Lq*iq, it dose not match the PI output value Vd.
(I multiply 10 to iq, because it is scaled with 10, and I multiply Vdc/sqrt(3) to PI output Vd for calculate real value )
Why does not it fit in the dq model expression?
Please explain me about this phenomenon.