


Part Number: TMS320F28335
Other Parts Discussed in Thread: CONTROLSUITE
Hello,
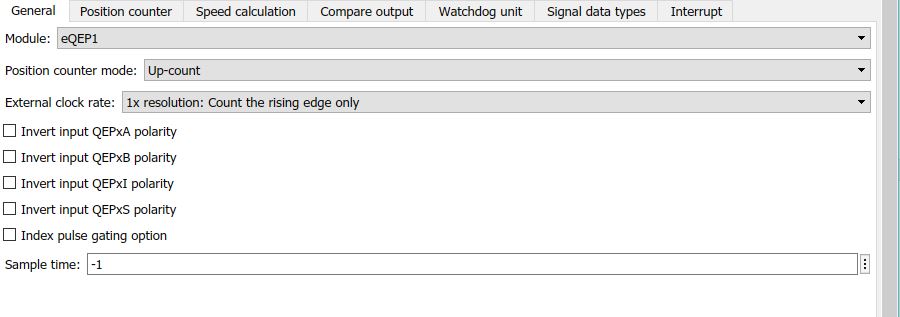
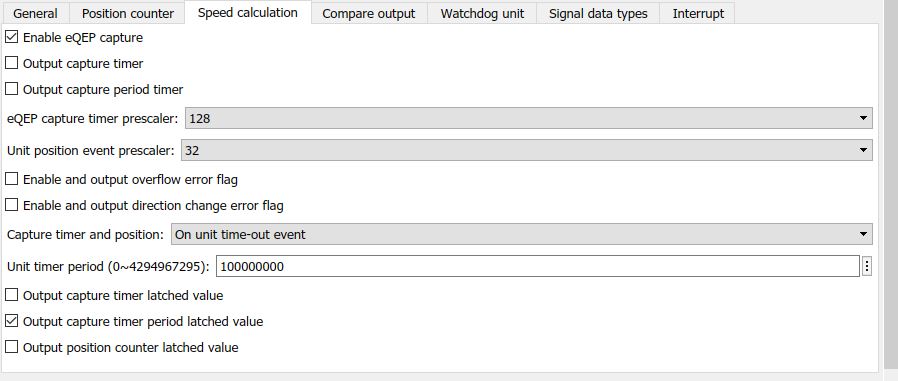
I need to calculate speed from an encoder using eQEP [simulink]. I have already read eQEP_sprug05a but I cant say that I understand what exactly have to do. I have a 2000 [nominal rpm] motor and an incremental tacho that gives me 1024 pulses per revolution. I tried to configure eQEP but all the registers are zeros [CCSv6, real time ].
How can I calculate speed; Is it possilbe only with QEPa pulse or I need QEPindex also;
In datasheet there is a different method for low speed and high speed. Is 2000 rmp high speed so I need to use both methods;
In ControlSuite there is 'Example_posspeed.xls' . Can I use this example to calculate register's values;
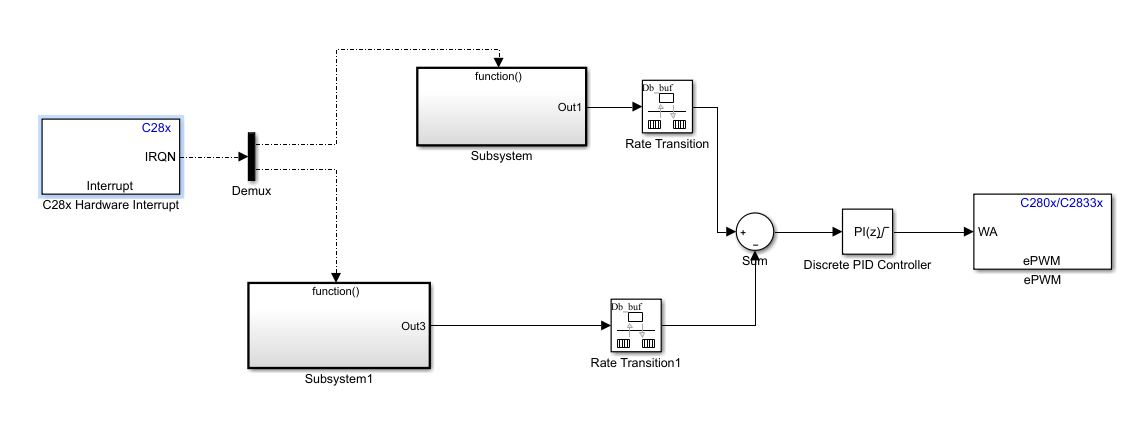
Can I use a PWM module instead of encoder pulses;

#include "DSP2833x_Device.h"
#include "DSP2833x_Examples.h"
#include "DSP2833x_GlobalPrototypes.h"
#include "rtwtypes.h"
#include "DSP_Motor_Drive_PI_eQEP.h"
void config_QEP_eQEP1(uint32_T pcmaximumvalue, uint32_T pcInitialvalue, uint32_T
unittimerperiod, uint32_T comparevalue, uint16_T
watchdogtimer, uint16_T qdecctl, uint16_T qepctl, uint16_T
qposctl, uint16_T qcapctl, uint16_T qeint)
{
EALLOW; /* Enable EALLOW*/
/* Enable internal pull-up for the selected pins */
GpioCtrlRegs.GPAPUD.bit.GPIO20 = 0; /* Enable pull-up on GPIO20 (EQEP1A)*/
GpioCtrlRegs.GPAPUD.bit.GPIO21 = 0; /* Enable pull-up on GPIO21 (EQEP1B)*/
GpioCtrlRegs.GPAPUD.bit.GPIO22 = 0; /* Enable pull-up on GPIO22 (EQEP1S)*/
GpioCtrlRegs.GPAPUD.bit.GPIO23 = 0; /* Enable pull-up on GPIO23 (EQEP1I)*/
/* Configure eQEP-1 pins using GPIO regs*/
GpioCtrlRegs.GPAMUX2.bit.GPIO20 = 1; /* Configure GPIO20 as EQEP1A*/
GpioCtrlRegs.GPAMUX2.bit.GPIO21 = 1; /* Configure GPIO21 as EQEP1B */
GpioCtrlRegs.GPAMUX2.bit.GPIO22 = 1; /* Configure GPIO22 as EQEP1S*/
GpioCtrlRegs.GPAMUX2.bit.GPIO23 = 1; /* Configure GPIO23 as EQEP1I*/
EDIS;
EQep1Regs.QPOSINIT = pcInitialvalue; /*eQEP Initialization Position Count*/
EQep1Regs.QPOSMAX = pcmaximumvalue; /*eQEP Maximum Position Count*/
EQep1Regs.QUPRD = unittimerperiod; /*eQEP Unit Period Register*/
EQep1Regs.QWDPRD = watchdogtimer; /*eQEP watchdog timer Register*/
EQep1Regs.QDECCTL.all = qdecctl; /*eQEP Decoder Control (QDECCTL) Register*/
EQep1Regs.QEPCTL.all = qepctl; /*eQEP Control (QEPCTL) Register*/
EQep1Regs.QPOSCTL.all = qposctl; /*eQEP Position-compare Control (QPOSCTL) Register*/
EQep1Regs.QCAPCTL.all = qcapctl; /*eQEP Capture Control (QCAPCTL) Register*/
EQep1Regs.QEPCTL.bit.FREE_SOFT = 2; /*unaffected by emulation suspend*/
EQep1Regs.QPOSCMP = comparevalue; /*eQEP Position-compare*/
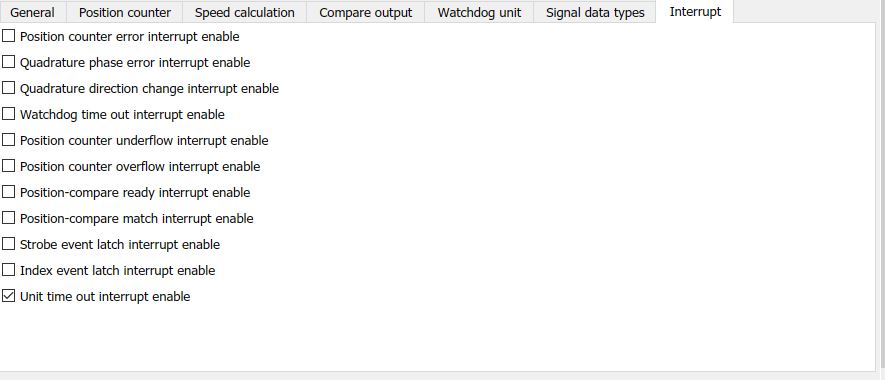
EQep1Regs.QEINT.all = qeint; /*eQEPx interrupt enable register*/
}




