Part Number: TMS320F28379S
Other Parts Discussed in Thread: C2000WARE
C2000 champs, please find message from my customer below and provide an example close to the specification he needs.
I am working with F28377S microcontroller,
I have some questions about i2c Module, because I can´t configure it properly (Configuration for send data to display).
I need:
- Microcontroller must be the Master device.
- Microcontroller must be send data /Start – data (With slave address) – Stop/ bytes to slave device.
- i2c data must be send when the function is call (Without interruptions).
In the examples that is provide with c2000 or Control suite this case is not contemplated (Examples with interruptions).
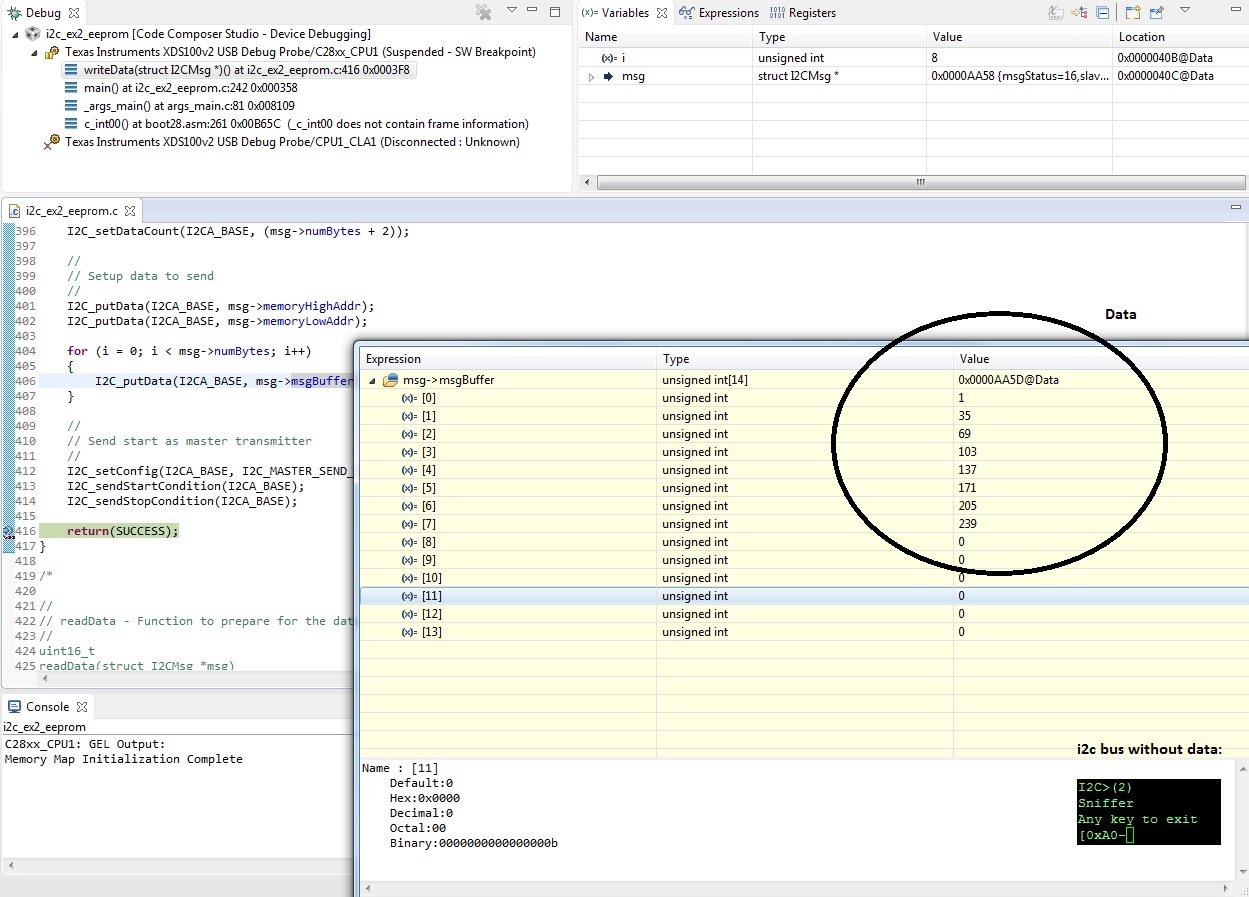
In my example the microcontroller only send the slave address to i2c bus (without data), I don’t know why.
I tried with many i2c configurations but the result is the same.