
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Hi guys,
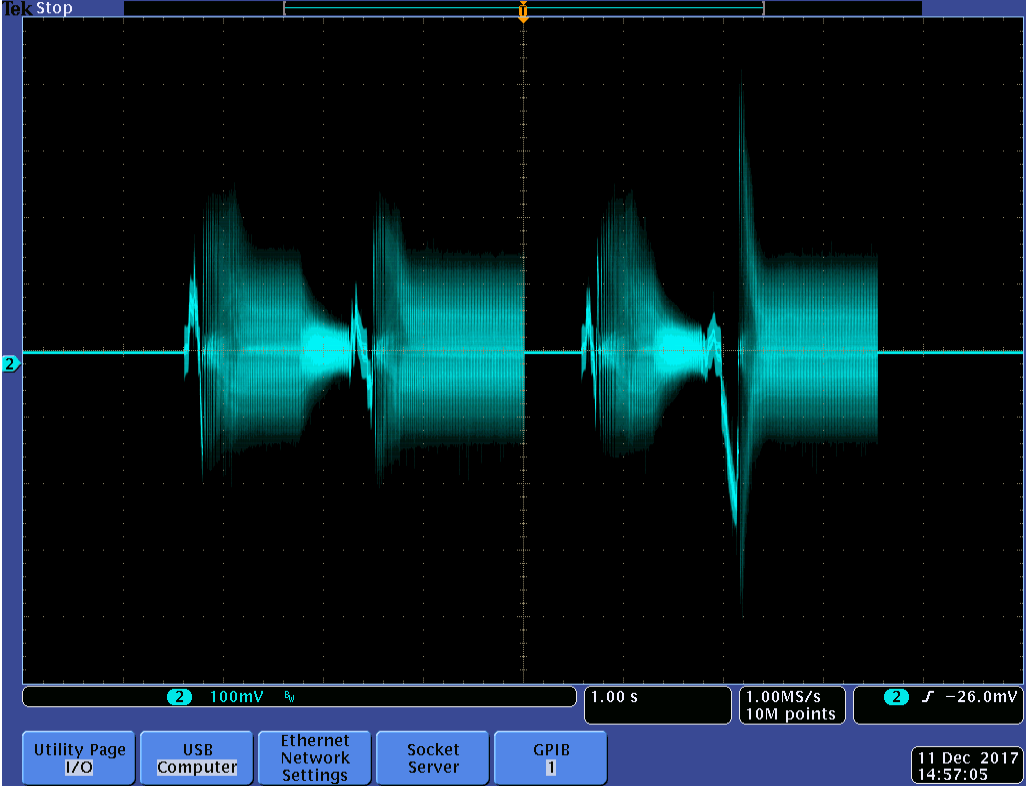
My Motor is an 230 BLDC Motor. When I set an Motor Speed the Motor has sometimes Current Overshoots at Startup.
Then comes the protection circuit triggers from the electronics
I use the PROJ_LAB05e with this Motor Parameters.
#define USER_SYSTEM_BANDWIDTH (10.0)
#define USER_MOTOR_TYPE MOTOR_Type_Pm
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr (NULL)
#define USER_MOTOR_Rs (1.38470221)
#define USER_MOTOR_Ls_d (0.0027)
#define USER_MOTOR_Ls_q (0.0027)
#define USER_MOTOR_RATED_FLUX (0.8508)
#define USER_MOTOR_MAGNETIZING_CURRENT (NULL)
#define USER_MOTOR_RES_EST_CURRENT (6.0)
#define USER_MOTOR_IND_EST_CURRENT (NULL)
#define USER_MOTOR_MAX_CURRENT (40.00)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (5.0)
#define USER_MOTOR_MAX_SPEED_KRPM (3.0)
#define USER_SYSTEM_INERTIA (0.06704008579)
#define USER_SYSTEM_FRICTION (-0.09187704325)
With Lab5c i learned the Inertia und Friction Values.
Is this correct that Friction can be negativ ?
Can you give my an advice why i become sometimes overshoots at startup.
Thanks
Alex



{kind=link}